Dieses Projekt war 2008 noch nicht im Blog, ich habe es 2015 aus dem alten CMS kopiert.

Das fertige Hackbrett — äußerlich original, bis auf das Kabel
Die Version, die sich in Frankreich aus dem Psalterium entwickelte, wurde auf französisch ‚doulcemér‘ genannt, dieser Name stammt vermutlich vom lateinischen ‚dulce melos‘, ’süßes Lied‘ oder ‚lieblicher Klang‘. In England heißt das Hackbrett heute noch ‚hammered dulcimer‘.
Wikipedia — ‚Hackbrett‚
Eine Tastatur kann eine sehr persönliche Sache sein. Insbesondere wenn es sich dabei um ein sehr gut gebautes Modell handelt, wie zum Beispiel eine IBM Model M. Das Design der Model M stammt von 1984, sie hat aber auch Heute noch eine grosse Fangemeinde. Sie hatte die üblichen Anschlüsse für alte Tastaturen: erst den 5poligen DIN-Stecker, später einen PS/2-Stecker. Zumindest meines Wissens nach wurde dieses Modell nie in einer USB-Variante herausgebracht.
Ein Bekannter wusste dass ich schon öfter Geräte mit USB-Anschluss gebastelt habe, und eines davon verhält sich sogar wie eine Tastatur (Es ist nicht wirklich eine Tastatur… aber das ist eine andere Geschichte…  ). Er ist ein grosser Freund der Model M, also fragte er ob ich einer Tastatur mit kaputter Elektronik neues Leben einhauchen könnte. Dies ist das Ergebnis…
). Er ist ein grosser Freund der Model M, also fragte er ob ich einer Tastatur mit kaputter Elektronik neues Leben einhauchen könnte. Dies ist das Ergebnis…
Hard- und Software
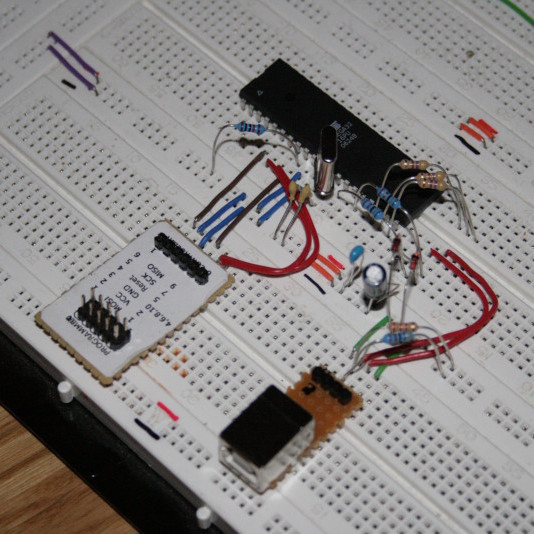
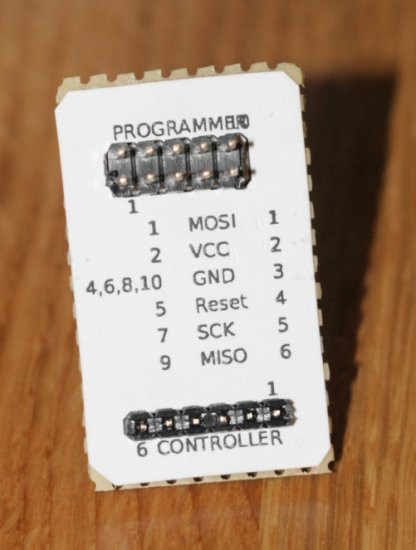
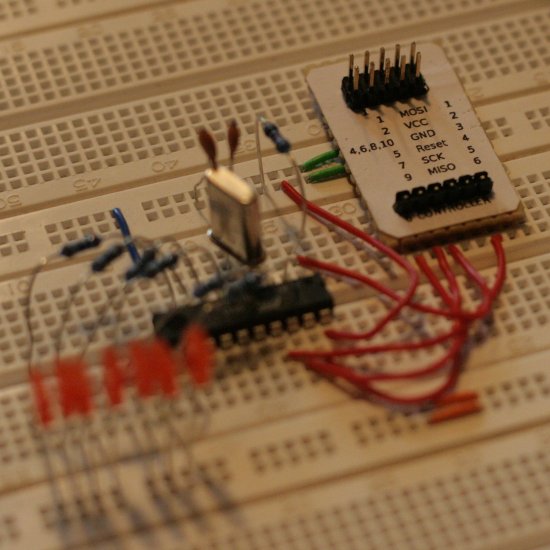
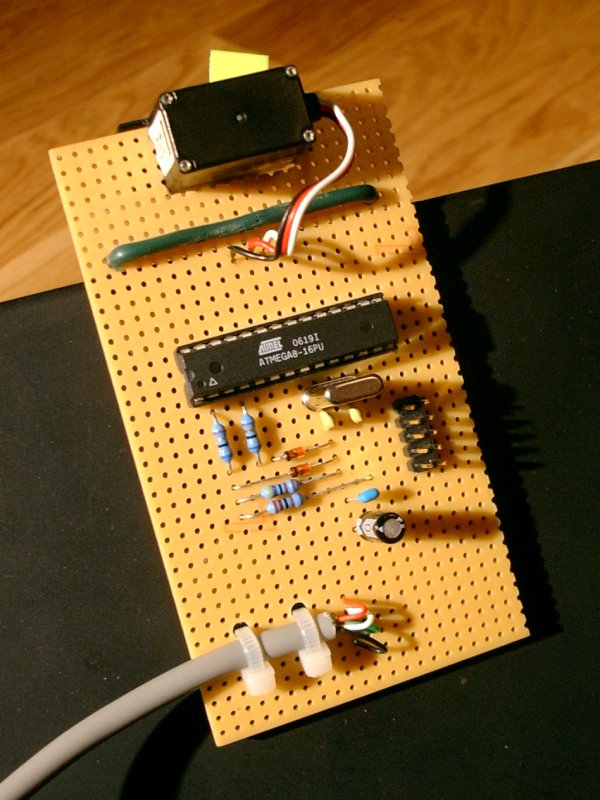
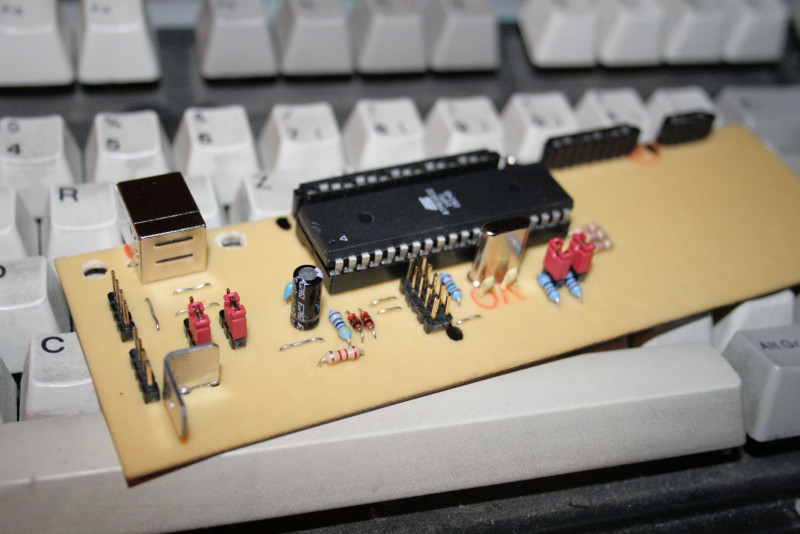
Ein erster Prototyp
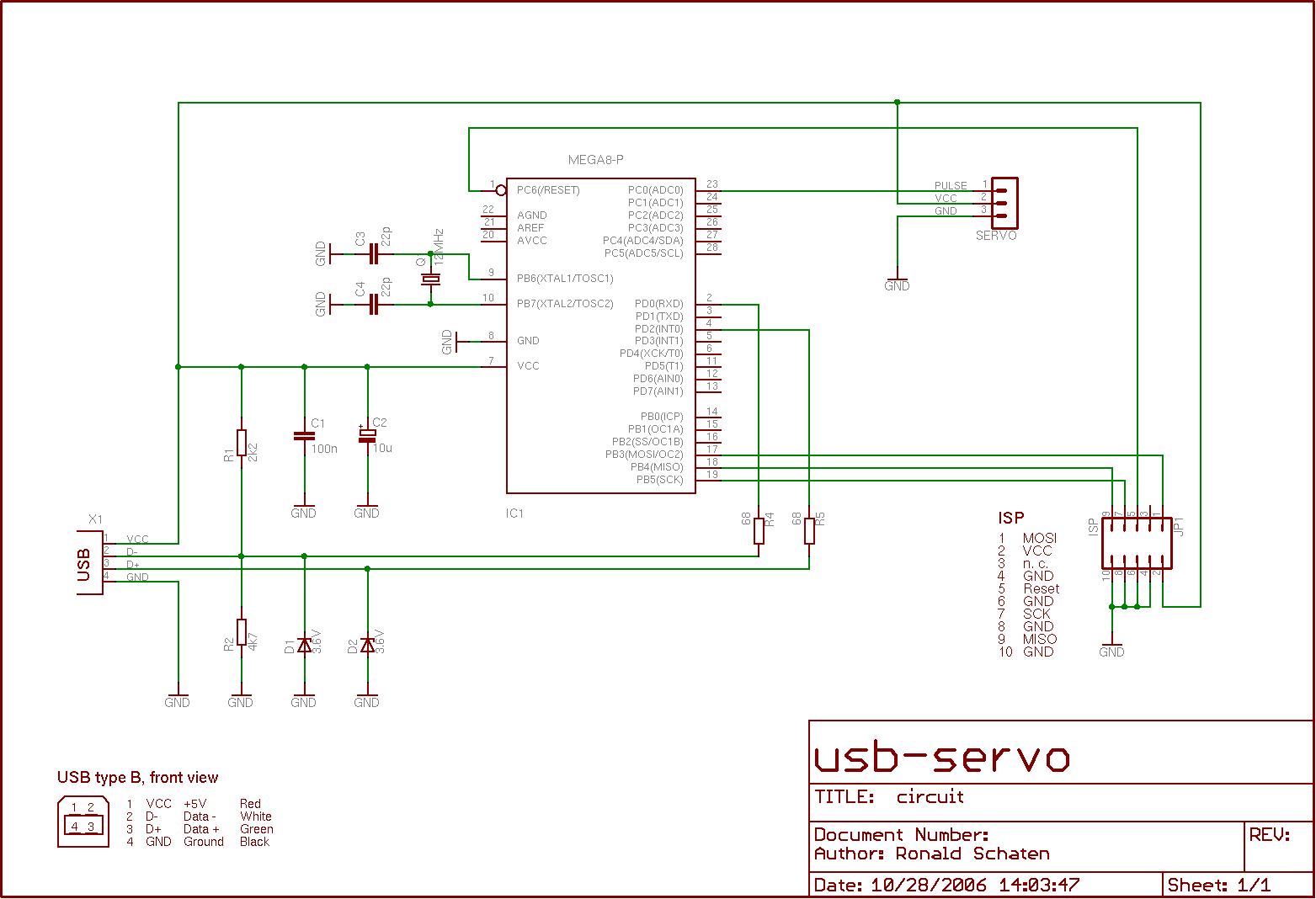
An dieser Matrix hängt ein Tastaturcontroller. Das ist ein Chip mit einer Reihe von I/O-Pins die den Zustand der Matrix überwachen. Am anderen Ende ist ein Interface mit dem der Chip dem Computer seine Befunde mitteilt. Ach ja, und nicht zu vergessen: der Chip hat auch drei Ausgänge zur Ansteuerung der LEDs für Num-, Caps- und Scroll-Lock.
In diesem Projekt habe ich den Tastaturcontroller und seine Schaltung durch einen ATmega32 und eine eigene Schaltung ersetzt. Der ATmega scannt die Matrix, steuert die LEDs und spricht mit dem Computer.
-

- Gut gebaut

-

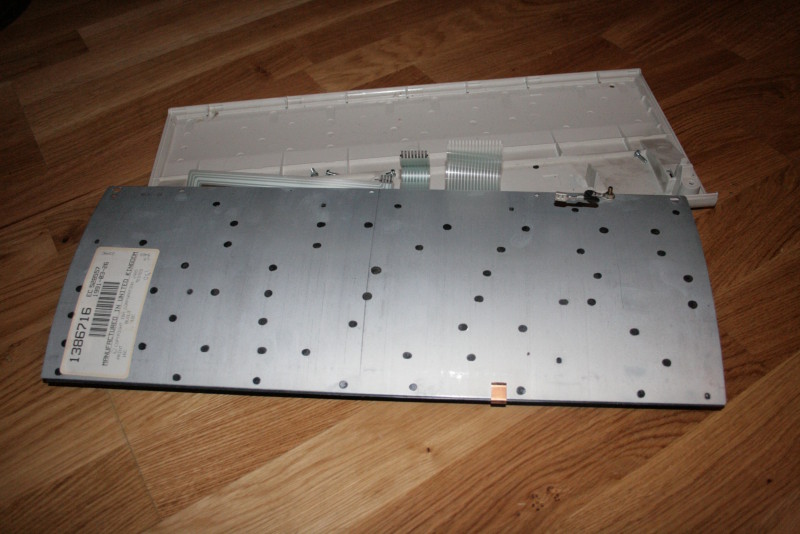
- Die Matrix

-

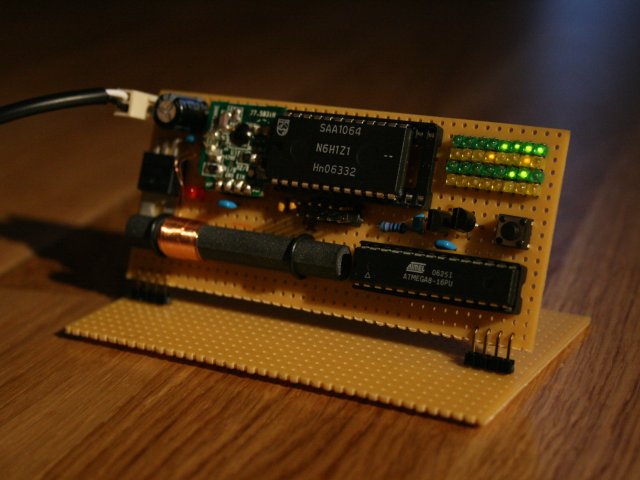
- Solide Grundlage
Für die angenehme Weiterentwicklung habe ich einen Boot-Loader in dem Chip untergebracht. Damit ist es möglich, der Tastatur eine neue Firmware zu verpassen ohne sie auseinander nehmen zu müssen. Und ohne einen speziellen Programmer zu brauchen.
Andere Hardware?
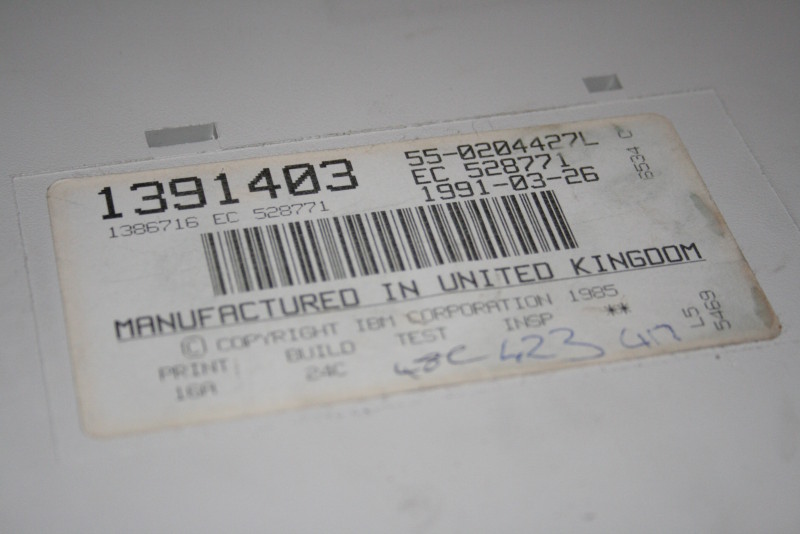
Original alt
Ein Layout habe ich zwar bislang nur für die IBM Model M gemacht, aber ich will zumindest noch eine Sun-Tastatur umbauen. Ich schätze dass ich dazu den Scan-Algorithmus umbauen muss, weil die Matrix bei Sun nicht in 16×8-Form angeordnet ist. Die Positionen der Tasten auf der Matrix werden wahrscheinlich auch anders sein, die werde ich rausfinden müssen. Und natürlich wird dann eine Platine mit anderem Layout fällig.
Features
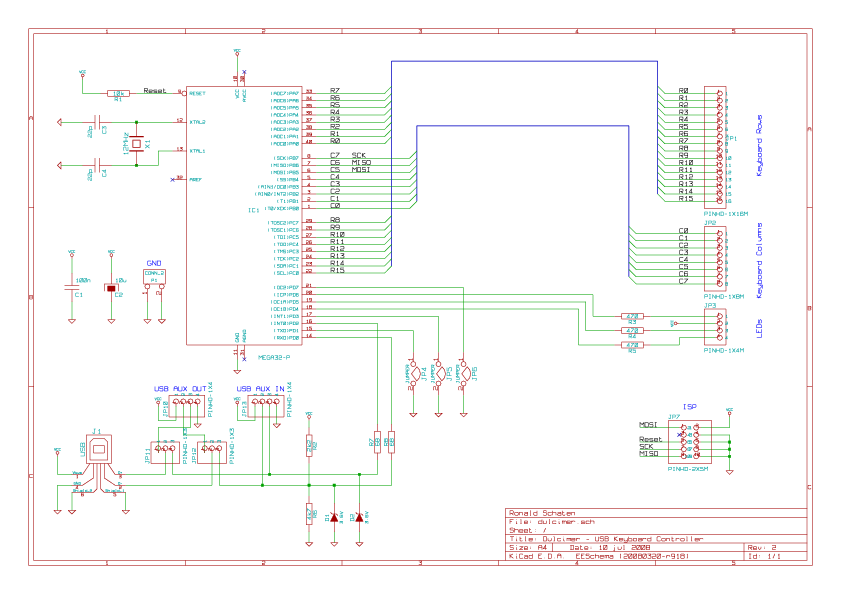
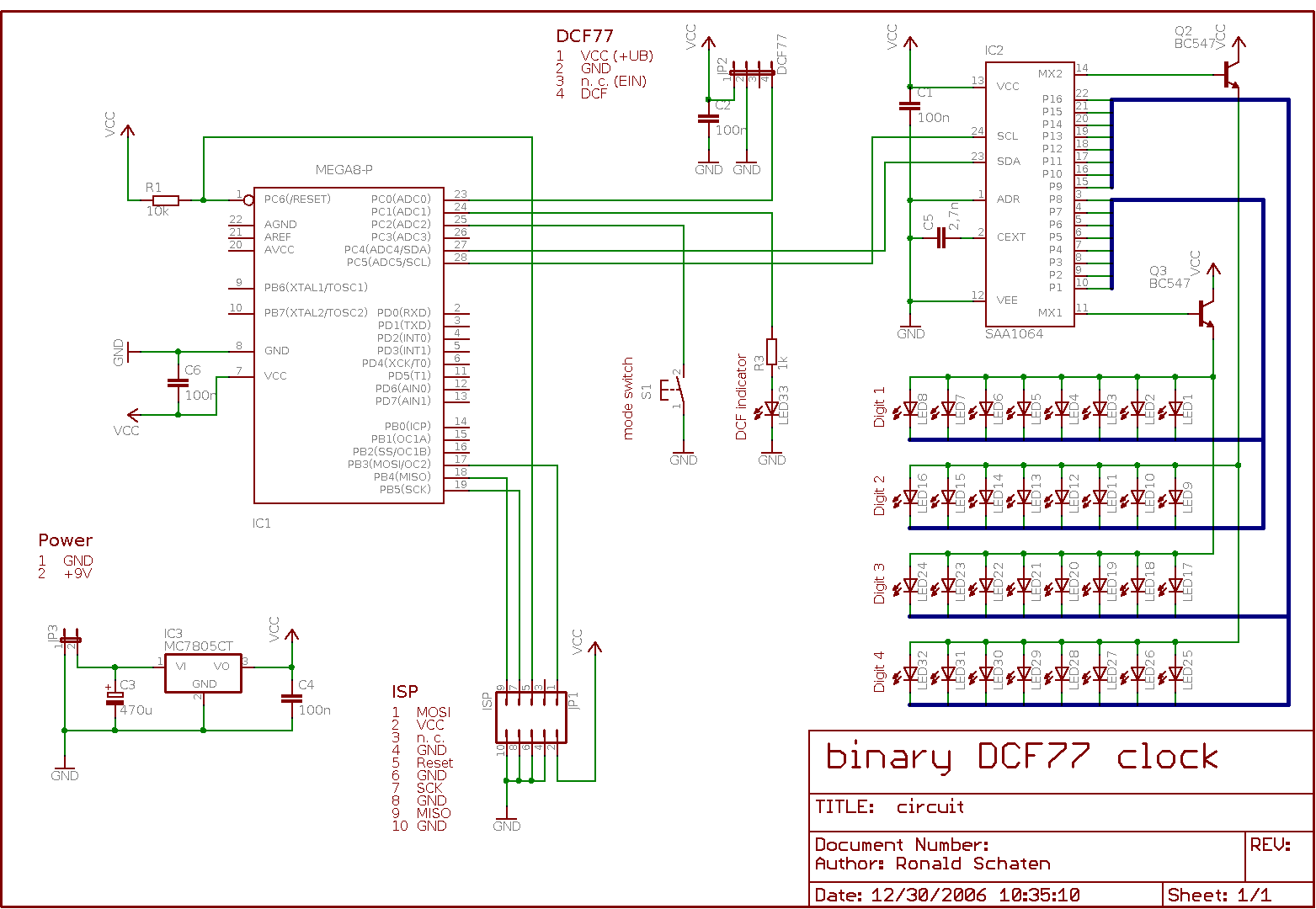
Powered by Kicad
- komplette Sätze oder Phrasen auf einzelne Tastendrücke abschicken
- ‚Autofeuer‘-Funktion auf Tasten die sowas normalerweise nicht haben, beispielsweise Alt+F4
- Tastaturlayout umstellen ohne den Computer umzukonfigurieren
- prellende Tasten ein- oder ausschalten, um Leute zu verwirren die den Computer benutzen wollen
- zufälliges Auslösen von Caps-Lock
- Die Pfeiltasten zu einem Mausersatz machen, ohne dafür spezielle Software zu brauchen
Mit ein paar Änderungen an der Hardware würden sogar noch deutlich mehr Möglichkeiten offen stehen:
- die Oldtimer-Tastatur in eine supermoderne kabellose Bluetooth-Tastatur umbauen
- Keylogger-Funktionen einbauen, zum Beispiel auf SD-Karte
- einen USB-Hub in die Tastatur einbauen
-
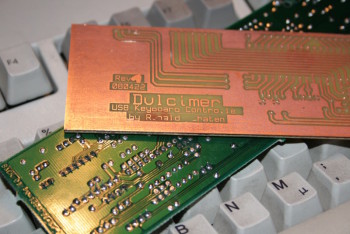
- Die erste selbstdesignte Platine
-

- Fertiger Aufbau
Wer nur ein wenig so darüber denkt wie ich wird nicht lange brauchen um selbst auf nützliche — oder besser: unnütze — Ideen zu kommen.
Benutzung
Die fertige Tastatur wird einfach an USB angeschlossen. Alle LEDs blinken kurz auf um zu zeigen dass das Gerät initialisiert ist.
Dann kann die Tastatur wie immer benutzt werden. Wenn zusätzliche Features eingebaut werden wird es zusätzliche Bedienungsanleitungen geben.
Nachteile
Ich weiss nicht wie die Hersteller von Tastaturen mit dem Problem der Geister-Tasten umgehen. Ich habe keine speziellen Massnahmen zu deren Verhinderung getroffen. Ich hoffe einfach mal, dass die Ingenieure bei IBM die Tasten in einer Weise auf der Matrix verteilt haben die das Problem minimiert. Aufgetreten sind solche Probleme bei mir bislang zwar nicht, aber ich wollte darauf hinweisen dass ich keine Gegenmassnahmen getroffen habe.
Danke!

Moderner Oldtimer
Ich habe mich sehr stark von Spaceman Spiff’s c64key inspirieren lassen. Diese Software basiert auf seinen Ideen.
Dann geht Dank an xleave, der mir die Platine geätzt hat (von den vielen blöden Elektronikfragen mal ganz abgesehen die er schon von mir vor den Latz gekriegt hat…).
Und ich danke natürlich FaUl vom Chaostreff Dortmund für die Idee zu dem Projekt.
Lizenz
Meine Arbeit, also alles außer dem USB-Treiber, fällt unter die GNU General Public License (GPL). Eine Kopie der GPL liegt dem Projekt bei. Der USB-Treiber untersteht einer gesonderten Lizenz von Objective Development. In firmware/usbdrv/License.txt befinden sich weitere Informationen dazu.
Download
- dulcimer_080712.tar.gz – Sourcecode und Dokumentation, 877kB
Siehe auch…
- clickykeyboards.com – eine Seite zur IBM Model M
- RUMP – praktisch das gleiche Projekt, eine parallele Entwicklung
- Geekhack – Lochraster-Version, basiert auf Dulcimer