Dieser Text war 2006 noch nicht im Blog, den habe ich 2015 aus dem alten CMS übernommen.

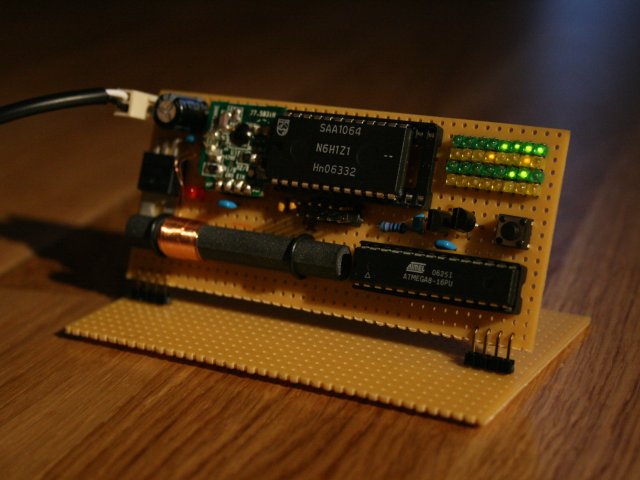
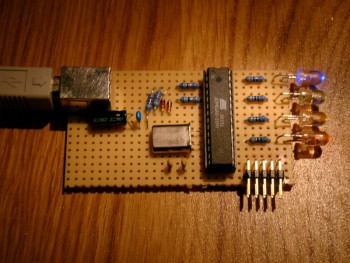
Die fertige Schaltung in Aktion.
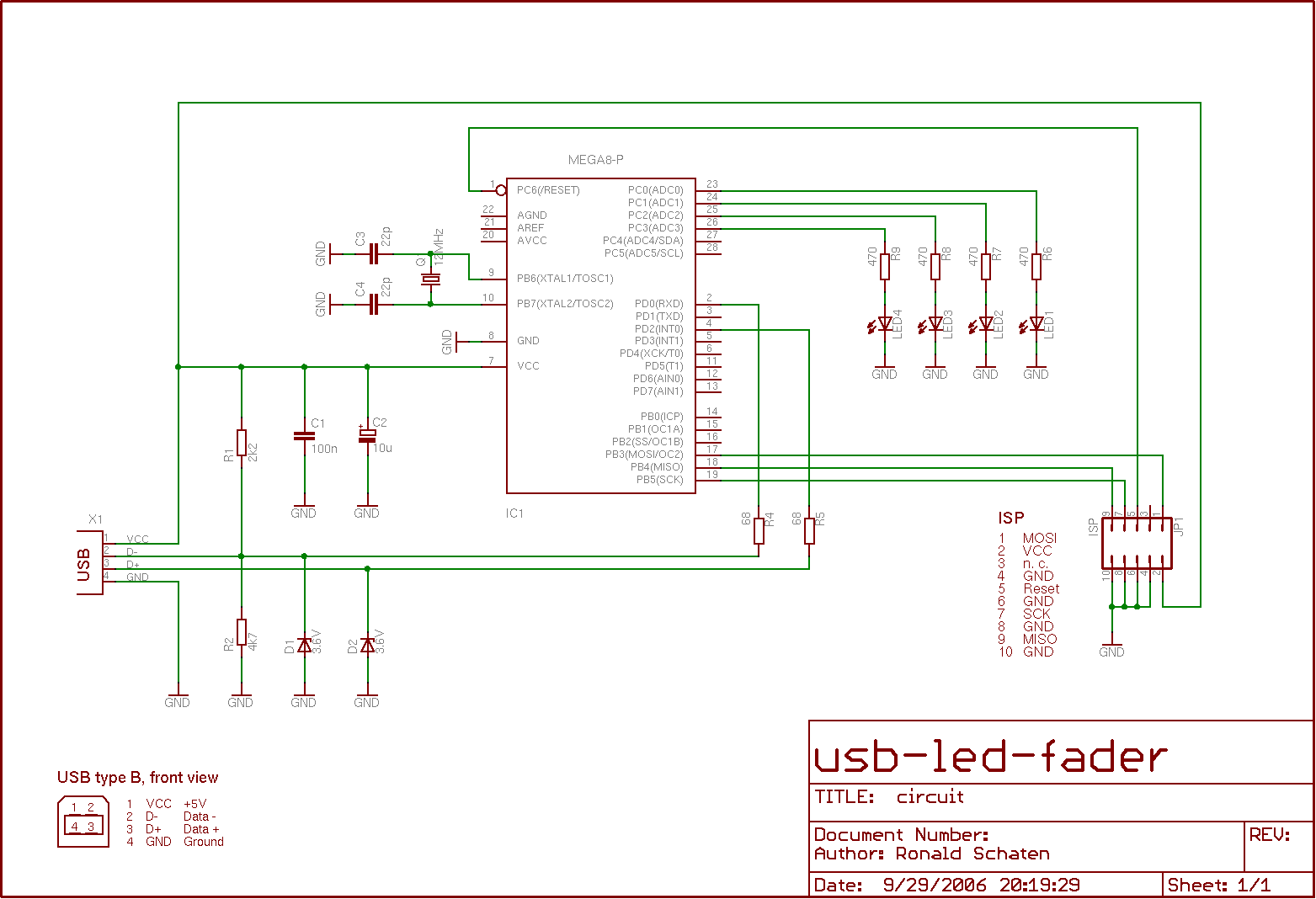
Der USB-LED-Fader ist ein Gerät mit dem mehrere LEDs mittels USB kontrolliert werden können. Ich habe es gebaut um den Status meiner Internet-Verbindung und den Füllstand meiner Festplatte, sowie den aktuellen Zustand meines Videorecorders (VDR) anzuzeigen. Die Anzahl der Einsatzmöglichkeiten ist praktisch unbegrenzt.
Die LEDs werden mittels Pulsweitenmodulation (PWM) gesteuert. So sind sie nicht einfach an oder aus, sondern die Helligkeit kann gesteuert werden. Und genau das ist die Hauptaufgabe des Mikrocontrollers: die Firmware verfügt über mehrere ‚Wellenformen‘, die auf den LEDs wiedergegeben werden können. So kann jede LED eine Art Sinus- oder Dreieckswelle darstellen, ohne daß der Host-Computer eingreifen muß.
Jede der LEDs kann separat eingestellt werden, jede kann ein eigenes Muster zugewiesen kriegen.
Es ist möglich, für jede LED drei ‚Wellen‘ zu definieren: zwei ‚unendliche‘ Wellen (0 & 1), und eine einmalige Welle (2). Die unendlichen Wellen wechseln sich ewig ab, wenn eine komplett angezeigt wurde wird die andere aktiv. Die einmalige Welle wird dagegen nur einmal angezeigt, nach ihrem Ablauf springt die Firmware wieder zu den unendlichen Wellen, falls diese definiert wurden.
Jede Welle wird mit drei Parametern definiert: Die Wellenform, die Dauer einer Wiederholung und die Anzahl der Wiederholungen bevor zur nächsten Welle gewechselt wird.
Die hier gezeigte Version unterstützt vier LEDs, es sollte aber nicht allzu schwer sein diese Zahl zwischen eins und acht zu variieren. Ich habe keine Tests mit mehr als vier LEDs gemacht, aber ich könnte mir vorstellen daß es dabei zu Problemen mit der Last auf dem Controller kommen könnte, das könnte die Kommunikation via USB beeinträchtigen.
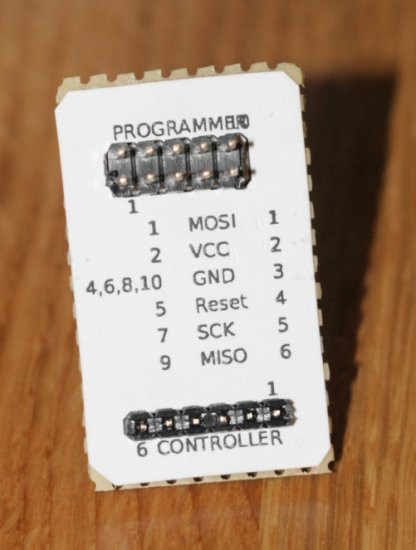
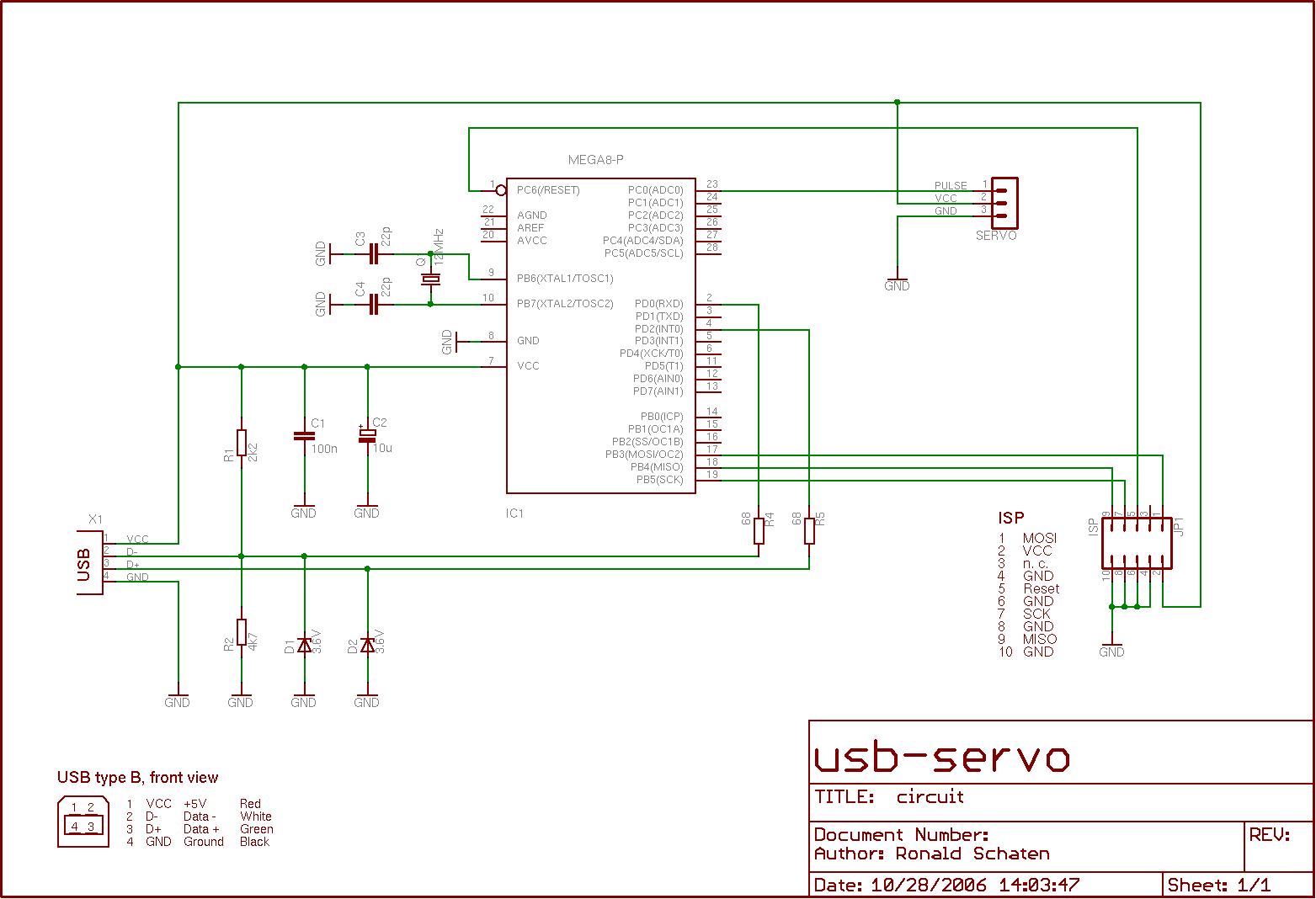
Die Distribution besteht aus drei Teilen: Der Firmware für einen ATmega8 Mikrocontroller, einem KommandozeilenÂTool das unter Linux läuft und den Plänen für die Schaltung.
Dieses Projekt basiert auf dem PowerSwitch Beispielprojekt von Objective Development. Wie dort wird auch hier der Firmware-USB-Treiber verwendet, den Objective Development für Atmels AVR-Mikrocontroller entwickelt hat.
Dieser Treiber ist eine reine Firmware-Implementierung des USB 1.1 (low speed device) Standards für den Einsatz auf billigen Ein-Chip-Systemen wie der AVR-Serie von Atmel. Er kann zum Beispiel auf einem ATtiny2313 oder sogar auf einigen noch kleineren 8-Pin-Devices eingesetzt werden. Er implementiert den Standard, soweit es für einen sinnvollen Einsatz notwendig ist. In der Datei „firmware/usbdrv/usbdrv.h“ der Distribution werden Features und Grenzen beschrieben.
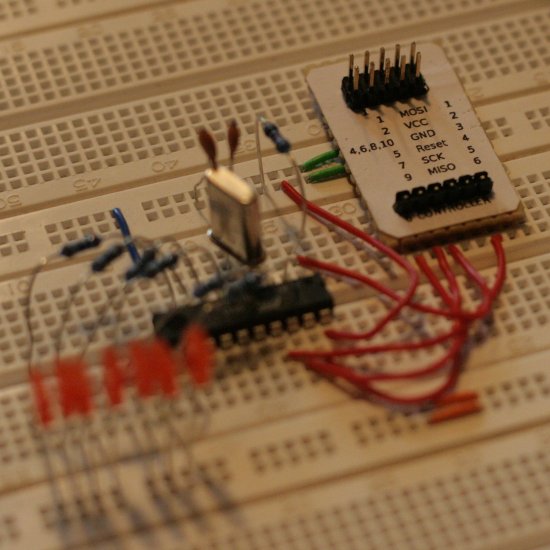
Bau und Installation
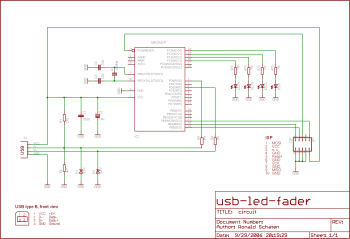
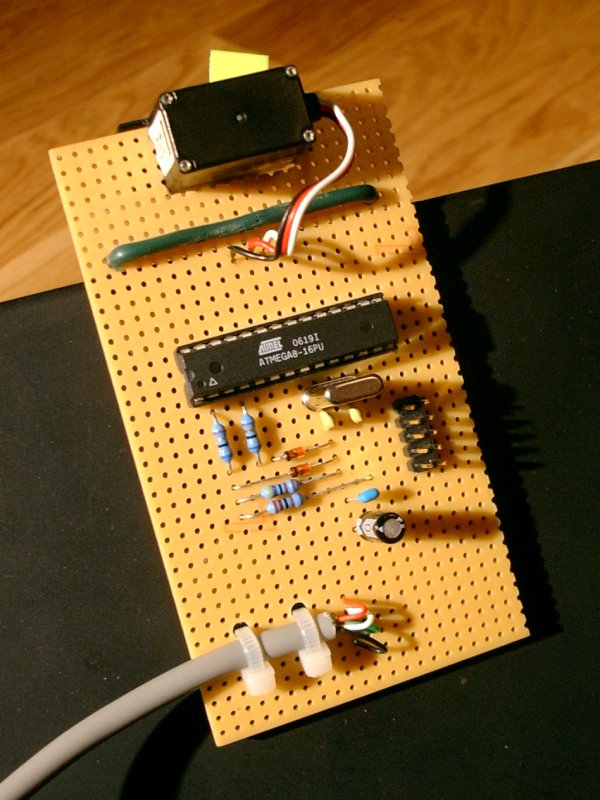
Die Schaltung umfaßt nur ein paar Standard-Bauteile. Darunter befindet sich kein spezieller USB-Chip.
Die Installation wird in der beiliegenden Dokumentation beschrieben.
Benutzung
Nachdem das fertige Gerät an USB angeschlossen wurde, sollten alle LEDs kurz aufleuchten, um zu bestätigen daß alles funktioniert.
Dann kann der Kommandozeilen-Client wie folgt zum Einsatz kommen:
|
|
usb-led-fader status usb-led-fader set <ledid> <waveid> <waveformid> <periodduration> <repetitioncount> usb-led-fader clear <ledid> usb-led-fader reset usb-led-fader show <waveformid> usb-led-fader test |
Mit der Set-Funktion können mehrere Wellen gleichzeitig definiert werden, indem einfach alle benötigten Parameter angegeben werden. Siehe Beispiele weiter unten.
Parameter
- ledId: Nummer der LED (0-n, je nachdem wie viele LEDs das Gerät hat)
- waveId: ID der Welle (0-1: ewige Wellen, 2: einmalige Welle).
- waveformId: ID der Wellenform (0-31: konstante Helligkeit, 32-37: Muster). Die Form der Welle kann mit der show-Funktion angezeigt werden.
- periodDuration: Zeit in zehntel Sekunden, die eine Anzeige der Wellenform dauern soll. Mit einem Wert von 0 wird die Welle gelöscht.
- repetitionCount: Anzahl der Wiederholungen für diese Welle mit einer 0 an dieser Stelle wird die Welle für immer wiederholt.
Beispiele
Den Status aller LEDs anzeigen
Die Ausgabe sieht wie folgt aus:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 |
LED 0 curid curvalue curpos currep nextupd 0 2 26 0 23 wave waveform length repeat duration updtime 0 38 32 1 20 45 1 0 1 1 0 1 2 0 1 1 0 1 LED 1 curid curvalue curpos currep nextupd 0 14 19 0 19 wave waveform length repeat duration updtime 0 38 32 1 20 45 1 0 1 1 0 1 2 0 1 1 0 1 LED 2 curid curvalue curpos currep nextupd 0 31 16 0 43 wave waveform length repeat duration updtime 0 38 32 1 20 45 1 0 1 1 0 1 2 0 1 1 0 1 LED 3 curid curvalue curpos currep nextupd 0 6 9 0 39 wave waveform length repeat duration updtime 0 38 32 1 20 45 1 0 1 1 0 1 2 0 1 1 0 1 |
Die Werte curvalue, curpos, nextupd und updtime dienen zum Debuggen. Sie sollten nur nach einem Blick in den Code von Interesse sein. Die Bedeutung der anderen Werte dürfte klar sein.
Die erste LED auf eine mittlere Helligkeit schalten
|
|
usb-led-fader set 0 0 15 10 1 |
So wird die Welle 0 der LED 0 auf die Wellenform 15 (eine mittlere Helligkeit) gesetzt. Sie wird für eine Sekunde angezeigt und nach einmal wiederholt bevor zur nächsten Welle gewechselt wird. Noch ist keine zweite Welle definiert, also bleibt dieser Zustand bis auf weiteres.
Jetzt eine zweite Welle für die erste LED definieren, etwas heller als die erste
|
|
usb-led-fader set 0 1 25 10 1 |
Dies ist Welle 1 auf LED 0, die Form 25 ist ebenfalls eine konstante Helligkeit. Nachdem die zweite Welle gesetzt wurde wechselt sie sich mit der ersten im Sekundentakt ab, weil beide Wellen die gleiche Länge und die gleiche Anzahl an Wiederholungen haben.
Eine dritte Welle auf die erste LED legen
|
|
usb-led-fader set 0 2 36 20 5 |
Dies setzt die dritte Welle (Nummer 2) auf der ersten LED. Wellenform 36 ist eine schicke Sinus-ähnliche Form, also beginnt die LED zu faden. Eine Wiederholung dauert dabei zwei Sekunden, die Welle wird fünf mal wiederholt. Da dies die dritte Welle ist, kehrt die Schaltung nach diesen Wiederholungen wieder in die Abwechslung zwischen den beiden Helligkeiten zurück, diese Welle wird somit gelöscht.
Mehrere Wellen gleichzeitig definieren
|
|
usb-led-fader set 0 0 15 10 1 0 1 25 10 1 0 2 36 20 5 |
Damit werden alle oben angegebenen Wellen gleichzeitig definiert. Die LED wird also erst fünf mal sinus-artig faden, und danach anfangen im Sekundentakt zwischen den beiden Helligkeitszuständen zu blinken.
Die erste LED löschen
Damit werden alle Wellen auf der ersten LED gelöscht.
Das Gerät zurücksetzen
Alle LEDs leuchten dabei einmal auf, um zu signalisieren daß alles funktioniert.
Eine Wellenform auf dem Bildschirm anzeigen
Die Ausgabe sieht wie folgt aus:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
wave 36 - length 64 31: ***** 30: ********* 29: *********** 28: *************** 27: ***************** 26: ******************* 25: ******************* 24: ********************* 23: *********************** 22: ************************* 21: ************************* 20: *************************** 19: ***************************** 18: ***************************** 17: ******************************* 16: ********************************* 15: *********************************** 14: *********************************** 13: ************************************* 12: *************************************** 11: *************************************** 10: ***************************************** 9: ******************************************* 8: ********************************************* 7: ********************************************* 6: *********************************************** 5: ************************************************* 4: ***************************************************** 3: ******************************************************* 2: *********************************************************** 1: **************************************************************** ================================================================ |
Dabei ist zu beachten, daß die angezeigte Breite der Länge der Wellenform entspricht. Eine einfache konstante Helligkeit (0-31) hat eine Länge von 1. Die Anzeige umfaßt also nur eine Spalte.
Das Gerät testen
Diese Funktion sendet viele zufällige Zahlen an das Gerät. Die Datenpakete werden wieder zurückgegeben und mit den Originalen verglichen, um Unterschiede zwischen den gesendeten und den empfangenen Daten festzustellen.
Schwachpunkte
Ich weiß, man kann das auch schöner anordnen… 
Wie schon erwähnt ist die Kontrolle der Pulsweitenmodulation für mehrere LEDs eine Menge Arbeit für den kleinen Controller. Das gleiche gilt für das Sprechen des USB-Protokolls. Beides zusammen ergibt eine hohe Last auf dem Gerät, dadurch ist die Kommunikation mit dem Gerät nicht zu 100% verläßlich. Tests haben aber gezeigt, daß mehr als 99% aller Kommandos ankommen.
ACHTUNG: Man sollte diese Schaltung deshalb nicht benutzen um zum Beispiel den Zustand eines Kernreaktors zu überwachen. Solltest Du das trotz dieser Warnung vorhaben, bitte ich um kleine Nachricht…
Danke!
Ich möchte der Firma Objective Development für die Möglichkeit danken, ihren Treiber benutzen zu können. Ohne den gäbe es dieses Projekt nicht.
Und ganz besonderer Dank geht an Thomas Stegemann. Er hat das Modul für die PWM-Steuerung geschrieben, und für mich selbst wäre es nahezu unmöglich gewesen, den Rest des Projektes ohne seine Hilfe zu schreiben. C ist halt nicht meine Muttersprache…
Lizenz
Unsere Arbeit, also alles außer dem USB-Treiber, fällt unter die GNU General Public License (GPL). Eine Kopie der GPL liegt dem Projekt bei. Der USB-Treiber untersteht einer gesonderten Lizenz von Objective Development. In firmware/usbdrv/License.txt befinden sich weitere Informationen dazu.
Download
 Das Autoquarium ist zwar mittlerweile auch fast fertig (in der ersten Ausbaustufe), aber zwischenzeitlich habe ich mich noch einem weiteren Projekt gewidmet. Das ist seit gerade eben online. Ebenfalls in der ersten Ausbaustufe: Dulcimer.
Das Autoquarium ist zwar mittlerweile auch fast fertig (in der ersten Ausbaustufe), aber zwischenzeitlich habe ich mich noch einem weiteren Projekt gewidmet. Das ist seit gerade eben online. Ebenfalls in der ersten Ausbaustufe: Dulcimer.