Ich fürchte, daß mir der Prozeß zu aufwendig ist, auch wenn ich liebend gerne mal eigene Glasnegative herstellen würde um meine alte Holzkamera auszuprobieren…
Jahr: 2006
Bedienungsanleitung für fliegende Teppiche
Bis gerade eben dachte ich, daß fliegende Teppiche nur in Geschichten aus 1001 Nacht vorkommen. Bei den Recherchen für mein nächstes Mikrocontroller-Projekt (eines habe ich schon wieder fertig, das muß nur noch etwas dokumentiert werden) bin ich aber auf eine ziemlich detaillierte Bedienungsanleitung gestoßen:
5.7 Miscellaneous Simulation Devices
Magic Carpet Simulation DeviceCA — Allows a device to be generally classified as one that uses the standard control of a magic carpet. This control is a bar, grasped by both hands, that controls the Yaw, Pitch and Roll of the carpet.
The bar, at which the pilot sits, may be pushed forward or pulled back to cause the carpet to dive or rise, respectively. In the zero position, the carpet is in level flight. Pushing forward on the bar causes the carpet to nose down and generates negative values. Pulling back on the bar causes the carpet to nose up and generates positive values.
Turning the bar turns the carpet. In the zero position, the carpet travels straight ahead. Pulling back on the right side turns the carpet to the right and generates positive values. Pulling back on the left side turns the carpet to the left and generates negative values.
Rotating the bar rolls the carpet. In the zero position, the carpet travels level. Rotating the bar in a clockwise direction rolls the carpet to the right and generates positive values. Rotating the bar in the counterclockwise direction rolls the carpet to the left and generates negative values.
Nein, ich habe nicht vor einen fliegenden Teppich zu entwickeln. Aber es soll ein Eingabegerät werden, und die Spezifikation für ebensolche (HID Usage Tables) enthält sehr detaillierte Informationen über mögliche Bauformen.
Niedlich ist auch folgender Absatz:
Spaceship Simulation Device
CA — This usage definition allows a device to be generally classified as one that uses standard controls found on a spaceship.
Wer hätte gedacht, daß die Steuerung von Raumschiffen schon standardisiert ist?
Falls es tatsächlich schon sowas wie einen Teppich-Controller gibt, würde mich ein Bild interessieren… 
USB-Servo (alias Mauszeigerzeiger)
Dieser Text war 2006 noch nicht im Blog, ich habe den 2015 aus dem alten CMS überführt.
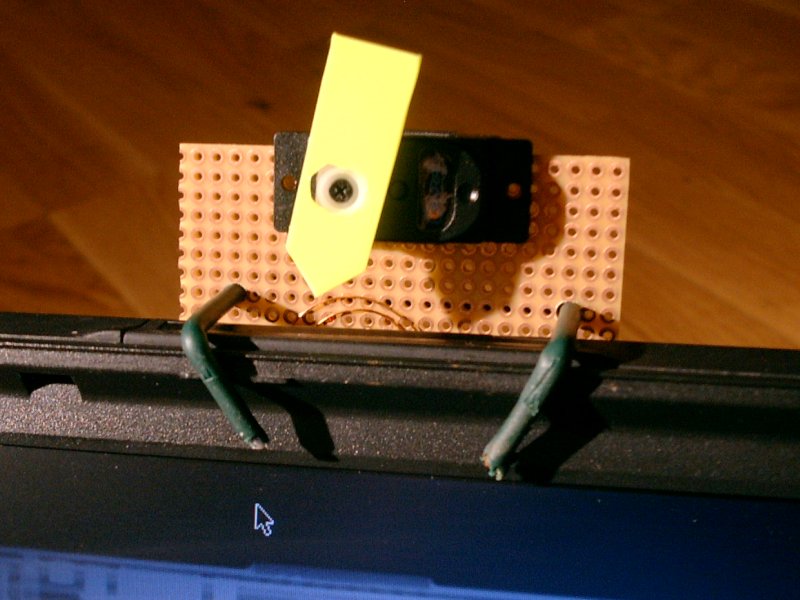
… nie wieder den Mauszeiger suchen!
Servos werden über drei Adern angeschlossen. Über eine rote und eine schwarze Ader werden sie mit Spannung versorgt, über eine gelbe mit dem Signal. Die Versorgungsspannung sollte zwischen 4,8 und 6 Volt liegen, die 5 Volt des USB-Ports liegen also im erlaubten Bereich. Auf der Signalleitung fließen keine großen Ströme, sie kann also direkt an den Controller angeschlossen werden. Der Winkel den das Servo einstellt wird über Pulsweitenmodulation (PWM) gesteuert. Dazu wird ein Signal mit 50Hz (ein Puls alle 20ms) erzeugt, die Länge der Pulse definiert den Winkel.
Ein Problem das ich nicht wirklich gelöst habe ist die Stromaufnahme: Ich weiß nicht, welcher Strom durch den Motor des Servos fließt. Er scheint niedrig genug zu sein um keine Probleme zu verursachen, aber ich habe nicht ausprobiert wie hoch er wird wenn das Servo blockiert wird. ICH HABE ALSO HIERMIT GEWARNT, für USB-Ports die in Flammen aufgehen fühle ich mich nicht mehr verantwortlich… 
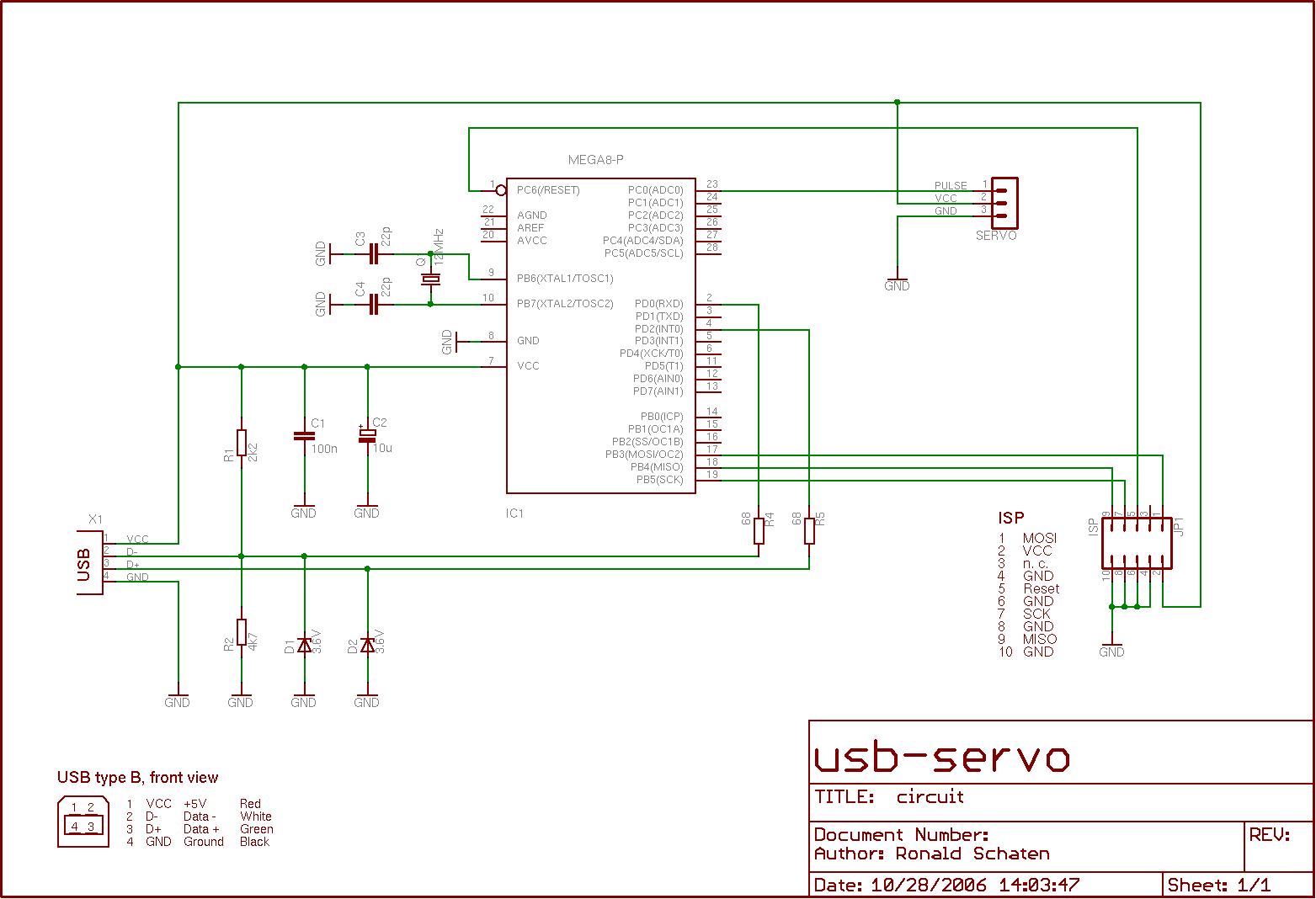
Die Schaltung umfaßt nur ein paar Standard-Bauteile. Darunter befindet sich kein spezieller USB-Chip.
Dieses Projekt basiert auf meinem USB-LED-Fader, der seinerseits auf dem PowerSwitch Beispielprojekt von Objective Development basiert. Wie in diesen beiden Projekten kommt auch hier der Firmware-USB-Treiber zum Einsatz, den Objective Development für die AVR Mikrocontroller von Atmel entwickelt haben.
Dieser Treiber ist eine reine Firmware-Implementierung des USB 1.1 Standards für langsame Geräte. Er läuft auf preiswerten Mikrocontrollern aus Atmels AVR-Serie, wie dem ATtiny2313 oder sogar den noch kleineren 8-Pin-Controllern. Er implementiert den Standard soweit, daß sich sinnvolle Applikationen damit entwickeln lassen. Die Datei „firmware/usbdrv/usbdrv.h“ enthält weitere Informationen zu Möglichkeiten und Grenzen.
Bau und Installation
Die Installation wird in der beiliegenden Dokumentation beschrieben.
Benutzung
Das Gerät wird mit dem USB-Port verbunden. Wenn das Servo noch nicht in der Ausgangsposition steht wird es sich dorthin bewegen.
Das Kommandozeilen-Tool wird wie folgt benutzt:
|
1 2 3 |
usb-servo status usb-servo set <angle> usb-servo test |
Parameter
- angle: Der Winkel in den das Servo gestellt werden soll. 0 ist ganz links, 255 ist ganz rechts.
Beispiele
Den Status des Servo auslesen
|
1 |
usb-servo status |
Das gibt den Winkel aus, in dem sich das Servo gerade befindet.
|
1 |
Current servo angle: 42 |
Einen neuen Winkel einstellen
|
1 |
usb-servo set 23 |
Das stellt das Servo auf den Winkel 23. 0 ist ganz links, 255 ist ganz rechts. Mit 23 wird das Servo also fast ganz nach links bewegt.
Das Gerät testen
|
1 |
usb-servo test |
Diese Funktion sendet eine Menge Zufallszahlen an das Gerät, das die Zahlen wieder zurück schickt. Der Client kontrolliert die gesendeten und Empfangenen Zahlen auf Gleichheit.
Demoanwendung xservopointer
Hinter den Kulissen
Um sie zu benutzen wird das Servo mittig über dem Bildschirm (mit kleinen Änderungen an den Quellen sind auch andere Positionen möglich) montiert und mit einem Zeiger ausgerüstet.
Zukünftig muß man dann nie mehr nach seinem Mauszeiger suchen, der Zeiger an dem Servo zeigt einem immer in welcher Richtung er sich befindet.
Probleme
Das Hauptproblem sehe ich wie schon erwähnt in der Stromaufnahme. Ich habe das mit meinem Servo an meinem Notebook ausprobiert, ich bin mir nicht sicher ob das an anderen Systemen funktionieren würde. DIES KANN DEN COMPUTER ZERSTÖREN, und niemand außer demjenigen der es anschließt fühlt sich für eventuelle Schäden verantwortlich.
Ein anderes (kleineres) Problem ist die holperige Implementierung der Pulsweitenmodulation. Ich habe die Timing-Werte mittels Trial and Error ermittelt, die müssen nicht notwendigerweise für jedes Servo stimmen. Andererseits denke ich, daß Servos austauschbar sein sollten. Allerdings ist dies mein erstes und bislang einziges Servo, darüber kann ich also nicht viel sagen.
Danke!
Ich danke Objective Development für die Möglichkeit, den Treiber für mein Projekt zu benutzen. Ohne den Treiber würde dieses Projekt nicht existieren.
Lizenz
Meine Arbeit, also alles außer dem USB-Treiber, fällt unter die GNU General Public License (GPL). Eine Kopie der GPL liegt dem Projekt bei. Der USB-Treiber untersteht einer gesonderten Lizenz von Objective Development. In firmware/usbdrv/License.txt befinden sich weitere Informationen dazu.
Download
- usb-servo_061028.tar.gz – Schaltung, Sourcecode und Dokumentation, 391kB
SSH-Tunnel
Dieser Text beschreibt, wie man beinahe jeden Dienst benutzen kann, wenn man die Möglichkeit hat mit SSH aus einem Netz herauszukommen.
Spamflut
Hier im Blog funktioniert die Spamabwehr zur Zeit vorzüglich. Wo es im Moment nicht so gut klappt ist mein Mail-Postfach. Zwar werden vom Spamassassin in der Woche immer noch über 2.000 Mails aussortiert, aber seit ein paar Wochen kommen trotzdem wieder eine Menge Spam-Mails durch den Filter. Jahrelang hatte ich in der Woche vielleicht fünf oder sechs Mails die fälschlicherweise nicht erkannt wurden. Momentan sind es etwa 50 am Tag! 
Das geht mir ziemlich auf den sprichwörtlichen Keks. Zumal ich nicht wetten würde, daß ich bei der täglichen Löschaktion nur Spam erwische…
Gibt es allgemein eine Spamwelle die der Assassin nicht erkennt, oder geht das nur mir so?
Legale Filme im Netz
Interessant für Liebhaber alter Filme die der englischen Sprache mächtig sind: Free Movies & Documentaries.
GEZ für Server?
Nur ein Gedanke, ich will damit niemandem einen Floh ins Ohr setzen: Wenn die GEZ in Zukunft eine Internet-Steuer erhebt, welche Auswirkungen hat das auf die Betreiber und die Anbieter von Root-Servern?
Ich habe einen solchen Server gemietet, aber bevor ich da keine klare Aussage zu habe werde ich niemandem verraten, daß der für mich (unter anderem) den Zeitzeichen-Podcast von WDR5 einsammelt… 
(Nur um das klarzustellen: Mir ist klar, daß ein Root-Server normalerweise nicht dazu dient Podcasts einzusammeln. Ich bin zu Hause allerdings erbärmlich ans Internet angebunden — DSL-freie Zone, und ISDN gibt es bei uns nicht mit Flatrate. Daher habe ich auf dem Server bashpodder installiert und sauge die Dateien von Zeit zu Zeit ab, wenn ich mal irgendwo bin wo ich eine dicke Leitung habe.)
Indent: hidden feature
Durch die Controller-Bastelei bin ich ja im Moment der C-Hacker. Perl und Python laufen auf den Dingern ja leider nicht…
Da habe ich mir GNU indent installiert, um meine eigenen und fremde Quelltexte etwas anzuhübschen. Schön konfigurierbar, per Konfigurationsdatei kann ich dem Ding beibringen die Klammern so zu setzen wie es mir beliebt (und manch anderen in den Wahnsinn treibt). Das ist eine Art Weltanschauung, aber für mich gehören öffnende Klammern nicht in eine neue Zeile.
So habe ich alles einstellen können, bis auf die öffnenden geschweiften Klammern bei der Definition von Funktionen. Es scheint ein (schon länger bekannter) Bug zu sein, daß das in der Doku fehlt: mit --braces-on-func-def-line bzw. -brf steht die Funktion aber doch zur Verfügung. Muß man halt nur finden…
USB-LED-Fader
Dieser Text war 2006 noch nicht im Blog, den habe ich 2015 aus dem alten CMS übernommen.

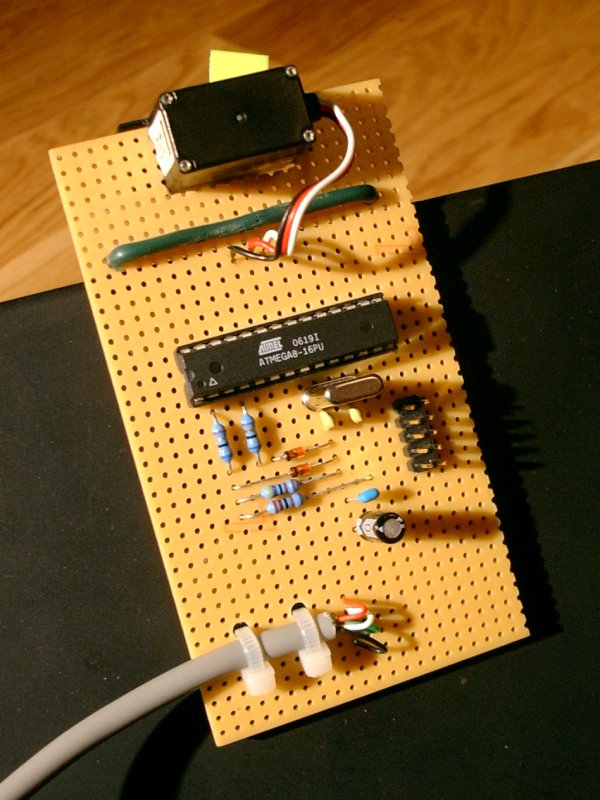
Die fertige Schaltung in Aktion.
Die LEDs werden mittels Pulsweitenmodulation (PWM) gesteuert. So sind sie nicht einfach an oder aus, sondern die Helligkeit kann gesteuert werden. Und genau das ist die Hauptaufgabe des Mikrocontrollers: die Firmware verfügt über mehrere ‚Wellenformen‘, die auf den LEDs wiedergegeben werden können. So kann jede LED eine Art Sinus- oder Dreieckswelle darstellen, ohne daß der Host-Computer eingreifen muß.
Jede der LEDs kann separat eingestellt werden, jede kann ein eigenes Muster zugewiesen kriegen.
Es ist möglich, für jede LED drei ‚Wellen‘ zu definieren: zwei ‚unendliche‘ Wellen (0 & 1), und eine einmalige Welle (2). Die unendlichen Wellen wechseln sich ewig ab, wenn eine komplett angezeigt wurde wird die andere aktiv. Die einmalige Welle wird dagegen nur einmal angezeigt, nach ihrem Ablauf springt die Firmware wieder zu den unendlichen Wellen, falls diese definiert wurden.
Jede Welle wird mit drei Parametern definiert: Die Wellenform, die Dauer einer Wiederholung und die Anzahl der Wiederholungen bevor zur nächsten Welle gewechselt wird.
Die hier gezeigte Version unterstützt vier LEDs, es sollte aber nicht allzu schwer sein diese Zahl zwischen eins und acht zu variieren. Ich habe keine Tests mit mehr als vier LEDs gemacht, aber ich könnte mir vorstellen daß es dabei zu Problemen mit der Last auf dem Controller kommen könnte, das könnte die Kommunikation via USB beeinträchtigen.
Die Distribution besteht aus drei Teilen: Der Firmware für einen ATmega8 Mikrocontroller, einem KommandozeilenÂTool das unter Linux läuft und den Plänen für die Schaltung.
Dieses Projekt basiert auf dem PowerSwitch Beispielprojekt von Objective Development. Wie dort wird auch hier der Firmware-USB-Treiber verwendet, den Objective Development für Atmels AVR-Mikrocontroller entwickelt hat.
Dieser Treiber ist eine reine Firmware-Implementierung des USB 1.1 (low speed device) Standards für den Einsatz auf billigen Ein-Chip-Systemen wie der AVR-Serie von Atmel. Er kann zum Beispiel auf einem ATtiny2313 oder sogar auf einigen noch kleineren 8-Pin-Devices eingesetzt werden. Er implementiert den Standard, soweit es für einen sinnvollen Einsatz notwendig ist. In der Datei „firmware/usbdrv/usbdrv.h“ der Distribution werden Features und Grenzen beschrieben.
Bau und Installation
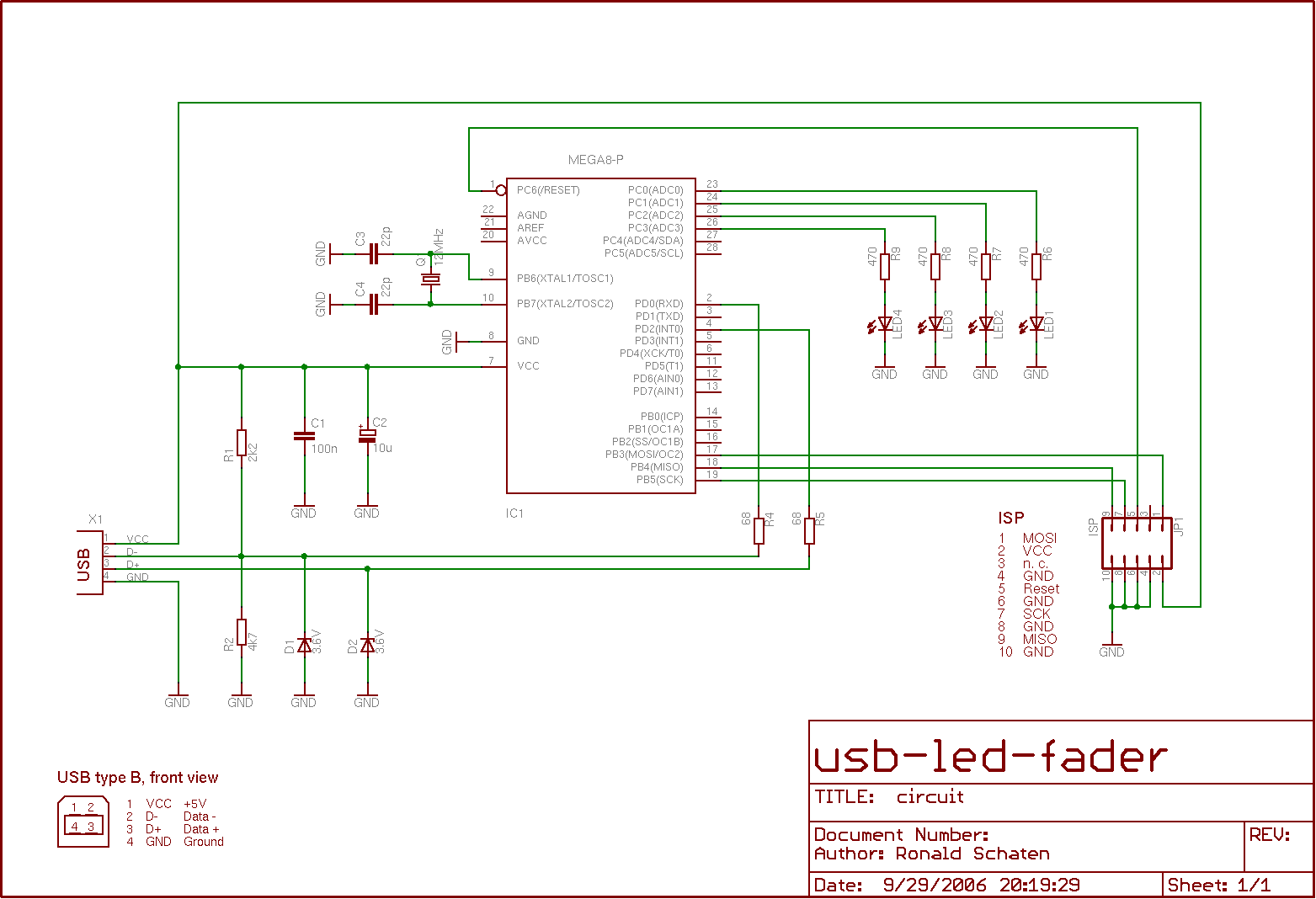
Die Schaltung umfaßt nur ein paar Standard-Bauteile. Darunter befindet sich kein spezieller USB-Chip.
Benutzung
Nachdem das fertige Gerät an USB angeschlossen wurde, sollten alle LEDs kurz aufleuchten, um zu bestätigen daß alles funktioniert.
Dann kann der Kommandozeilen-Client wie folgt zum Einsatz kommen:
|
1 2 3 4 5 6 |
usb-led-fader status usb-led-fader set <ledid> <waveid> <waveformid> <periodduration> <repetitioncount> usb-led-fader clear <ledid> usb-led-fader reset usb-led-fader show <waveformid> usb-led-fader test |
Mit der Set-Funktion können mehrere Wellen gleichzeitig definiert werden, indem einfach alle benötigten Parameter angegeben werden. Siehe Beispiele weiter unten.
Parameter
- ledId: Nummer der LED (0-n, je nachdem wie viele LEDs das Gerät hat)
- waveId: ID der Welle (0-1: ewige Wellen, 2: einmalige Welle).
- waveformId: ID der Wellenform (0-31: konstante Helligkeit, 32-37: Muster). Die Form der Welle kann mit der show-Funktion angezeigt werden.
- periodDuration: Zeit in zehntel Sekunden, die eine Anzeige der Wellenform dauern soll. Mit einem Wert von 0 wird die Welle gelöscht.
- repetitionCount: Anzahl der Wiederholungen für diese Welle mit einer 0 an dieser Stelle wird die Welle für immer wiederholt.
Beispiele
Den Status aller LEDs anzeigen
|
1 |
usb-led-fader status |
Die Ausgabe sieht wie folgt aus:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 |
LED 0 curid curvalue curpos currep nextupd 0 2 26 0 23 wave waveform length repeat duration updtime 0 38 32 1 20 45 1 0 1 1 0 1 2 0 1 1 0 1 LED 1 curid curvalue curpos currep nextupd 0 14 19 0 19 wave waveform length repeat duration updtime 0 38 32 1 20 45 1 0 1 1 0 1 2 0 1 1 0 1 LED 2 curid curvalue curpos currep nextupd 0 31 16 0 43 wave waveform length repeat duration updtime 0 38 32 1 20 45 1 0 1 1 0 1 2 0 1 1 0 1 LED 3 curid curvalue curpos currep nextupd 0 6 9 0 39 wave waveform length repeat duration updtime 0 38 32 1 20 45 1 0 1 1 0 1 2 0 1 1 0 1 |
Die Werte curvalue, curpos, nextupd und updtime dienen zum Debuggen. Sie sollten nur nach einem Blick in den Code von Interesse sein. Die Bedeutung der anderen Werte dürfte klar sein.
Die erste LED auf eine mittlere Helligkeit schalten
|
1 |
usb-led-fader set 0 0 15 10 1 |
So wird die Welle 0 der LED 0 auf die Wellenform 15 (eine mittlere Helligkeit) gesetzt. Sie wird für eine Sekunde angezeigt und nach einmal wiederholt bevor zur nächsten Welle gewechselt wird. Noch ist keine zweite Welle definiert, also bleibt dieser Zustand bis auf weiteres.
Jetzt eine zweite Welle für die erste LED definieren, etwas heller als die erste
|
1 |
usb-led-fader set 0 1 25 10 1 |
Dies ist Welle 1 auf LED 0, die Form 25 ist ebenfalls eine konstante Helligkeit. Nachdem die zweite Welle gesetzt wurde wechselt sie sich mit der ersten im Sekundentakt ab, weil beide Wellen die gleiche Länge und die gleiche Anzahl an Wiederholungen haben.
Eine dritte Welle auf die erste LED legen
|
1 |
usb-led-fader set 0 2 36 20 5 |
Dies setzt die dritte Welle (Nummer 2) auf der ersten LED. Wellenform 36 ist eine schicke Sinus-ähnliche Form, also beginnt die LED zu faden. Eine Wiederholung dauert dabei zwei Sekunden, die Welle wird fünf mal wiederholt. Da dies die dritte Welle ist, kehrt die Schaltung nach diesen Wiederholungen wieder in die Abwechslung zwischen den beiden Helligkeiten zurück, diese Welle wird somit gelöscht.
Mehrere Wellen gleichzeitig definieren
|
1 |
usb-led-fader set 0 0 15 10 1 0 1 25 10 1 0 2 36 20 5 |
Damit werden alle oben angegebenen Wellen gleichzeitig definiert. Die LED wird also erst fünf mal sinus-artig faden, und danach anfangen im Sekundentakt zwischen den beiden Helligkeitszuständen zu blinken.
Die erste LED löschen
|
1 |
usb-led-fader clear 0 |
Damit werden alle Wellen auf der ersten LED gelöscht.
Das Gerät zurücksetzen
|
1 |
usb-led-fader reset |
Alle LEDs leuchten dabei einmal auf, um zu signalisieren daß alles funktioniert.
Eine Wellenform auf dem Bildschirm anzeigen
|
1 |
usb-led-fader show 36 |
Die Ausgabe sieht wie folgt aus:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 |
wave 36 - length 64 31: ***** 30: ********* 29: *********** 28: *************** 27: ***************** 26: ******************* 25: ******************* 24: ********************* 23: *********************** 22: ************************* 21: ************************* 20: *************************** 19: ***************************** 18: ***************************** 17: ******************************* 16: ********************************* 15: *********************************** 14: *********************************** 13: ************************************* 12: *************************************** 11: *************************************** 10: ***************************************** 9: ******************************************* 8: ********************************************* 7: ********************************************* 6: *********************************************** 5: ************************************************* 4: ***************************************************** 3: ******************************************************* 2: *********************************************************** 1: **************************************************************** ================================================================ |
Dabei ist zu beachten, daß die angezeigte Breite der Länge der Wellenform entspricht. Eine einfache konstante Helligkeit (0-31) hat eine Länge von 1. Die Anzeige umfaßt also nur eine Spalte.
Das Gerät testen
|
1 |
usb-led-fader test |
Diese Funktion sendet viele zufällige Zahlen an das Gerät. Die Datenpakete werden wieder zurückgegeben und mit den Originalen verglichen, um Unterschiede zwischen den gesendeten und den empfangenen Daten festzustellen.
Schwachpunkte

Ich weiß, man kann das auch schöner anordnen…
ACHTUNG: Man sollte diese Schaltung deshalb nicht benutzen um zum Beispiel den Zustand eines Kernreaktors zu überwachen. Solltest Du das trotz dieser Warnung vorhaben, bitte ich um kleine Nachricht…
Danke!
Ich möchte der Firma Objective Development für die Möglichkeit danken, ihren Treiber benutzen zu können. Ohne den gäbe es dieses Projekt nicht.
Und ganz besonderer Dank geht an Thomas Stegemann. Er hat das Modul für die PWM-Steuerung geschrieben, und für mich selbst wäre es nahezu unmöglich gewesen, den Rest des Projektes ohne seine Hilfe zu schreiben. C ist halt nicht meine Muttersprache…
Lizenz
Unsere Arbeit, also alles außer dem USB-Treiber, fällt unter die GNU General Public License (GPL). Eine Kopie der GPL liegt dem Projekt bei. Der USB-Treiber untersteht einer gesonderten Lizenz von Objective Development. In firmware/usbdrv/License.txt befinden sich weitere Informationen dazu.
Download
- usb-led-fader_061002.tar.gz – Schaltung, Sourcecode und Dokumentation, 574kB
USB-LED-Fader
 So, es ist vollbracht! Ich habe gerade die angekündigte Seite mit dem Elektronikprojekt hochgeladen: Mein USB-LED-Fader.
So, es ist vollbracht! Ich habe gerade die angekündigte Seite mit dem Elektronikprojekt hochgeladen: Mein USB-LED-Fader.
Das Teil besteht aus einem Mikrocontroller (ATmega8), vier LEDs und ein paar Kleinteilen. Der Controller ist praktisch direkt an USB angeschlossen, darüber bezieht er auch seinen Saft. Auf dem Hostrechner kann unter Linux ein Kommandozeilenprogramm benutzt werden, um die LEDs zu steuern. Dabei werden die nicht nur an- oder ausgeschaltet, sondern mittels Pulsweitenmodulation zum Faden gebracht. Das Faden an sich wird, einmal aktiv, allein von dem Mikrocontroller gesteuert. Somit wird die CPU des Linux-Rechners nicht weiter strapaziert.
Ich habe das Teil gebaut um den Zustand meines Videorecorders (VDR) und meiner Internetverbindung (ISDN ohne Flatrate… ) anzuzeigen. Denkbar sind alle möglichen Anwendungen, und wenn es nur als Moodlight irgendwo rumliegt.
Ich habe das Projekt ziemlich umfangreich — geradezu geschwätzig — dokumentiert und zum Download freigegeben. Somit stellt das meine erste Veröffentlichung unter der GPL dar!
An dieser Stelle nochmal Dank an Objective Development, die den USB-Treiber für AVR zur Verfügung gestellt haben. Und an Thomas Stegemann für die Pulsweitenmodulation und allgemeine Unterstützung in Bezug auf kranke Programmiersprachen (C in diesem Fall).
Das war das eine Projekt, das mich die letzten Wochen in Anspruch genommen hat. Das zweite — der Neuaufbau des erwähnten Videorecorders — ist auch schon abgeschlossen, muss aber noch etwas aufbereitet werden. Kommt dann auch ins Netz. Wann ich dazu komme steht aber noch in den Sternen… ich habe schon die nächste Schaltung auf dem Steckbrett aufgebaut…