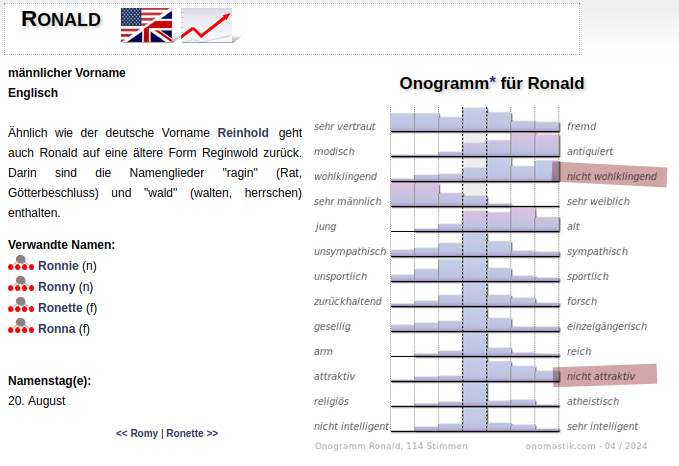
Eigentlich bin ich mit meinem Vornamen sehr zufrieden. Heute habe ich aber gelernt was ein Onogramm ist, und jetzt bin ich mir nicht mehr sicher.
Ein Onogramm ist ein Begriff aus der Onomatologie oder Onomastik (Namenforschung). Man befragt viele Leute nach Assoziationen die sie mit einem Namen haben, daraus ergibt sich dann ein Diagramm wie das nebenstehende. Demnach klingt mein Name offenbar nicht gut, und zu meiner Attraktivität kann ich nur voreingenommen Stellung nehmen (Hint: ich versuche absichtlich, niemandem mit Fotos meiner selbst auf den Keks zu gehen).
Wer sich das genauer ansehen möchte findet dieses und viele weitere im Vornamen-Lexikon auf onomastik.com.
Kurze Anekdote zum Thema
Vor einigen Jahren sind wir im Kollegenkreis auf das Thema gekommen. Ich weiss nicht mehr wo wir das nachgeschlagen haben, vermutlich in der Wikipedia, aber wir haben uns die Etymologie unserer Namen rausgesucht. Ich („Der die Kraft der Götter hat“) saß zusammen mit Torsten („Thors Stein“) und Holger („Speerkämpfer“, oder „Kämpfer von der Insel“). Dabei war Benjamin, der wochenlang zu hören bekommen hat dass sein Name „Sohn meiner rechten Hand“ bedeutet.
(Falls hier ein Benjamin mitliest: ich mag den Namen, und der hat auch noch andere mögliche Übersetzungen. Man kann den durchaus stolz tragen.)
Mein Name ist Ronald, und ich habe ein ungesundes Verhältnis zu Taschenrechnern.
Seit ich mich vor einigen Jahren mal intensiver mit der Programmierung von Taschenrechnern befasst habe faszinieren mich diese kleinen Computer. Mehr als sie sollten: in meinem Leben finden kaum Berechnungen statt die über die vier Grundrechenarten hinausreichen. Das hält mich nicht davon ab, nach interessanten Geräten ausschau zu halten.
So hat unter anderem auch ein TI-Nspire CASzu mir gefunden. Die schwarze Variante mit Touchpad, noch mit einem monochromen Display.
Das Service-Menü
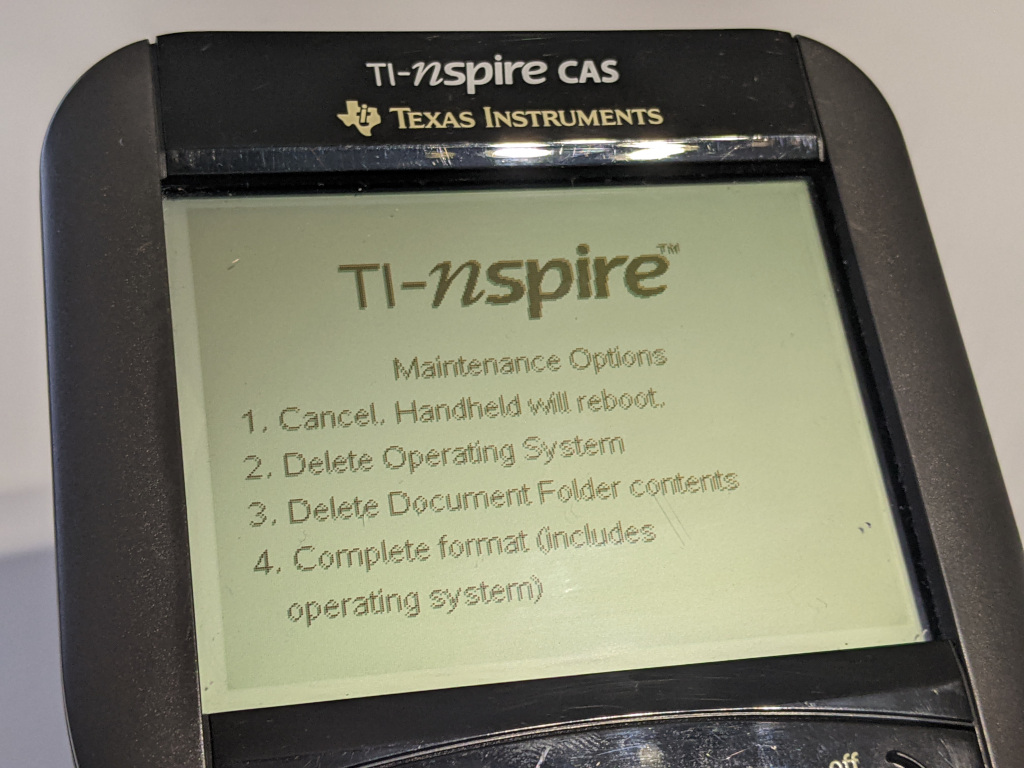
Vorhin überkam es mich wieder. Ich habe Batterien eingelegt und mit dem Ding rumgespielt. Der hatte noch die ganzen (trivialen) Berechnungen die ich vor langer Zeit gemacht habe, also hatte ich die Idee einen Firmware-Reset zu machen. Mit einem gewissen Prozedere kommt man in ein Service-Menü, da hat man vier Optionen. Ich wollte gründlich sein und habe in einem Anflug geistiger Umnachtung die einzige genommen die fatal endet: „Complete format (includes operating system)“. Offenbar war es naiv, anzunehmen dass man das Gerät nicht on the fly bricken kann.
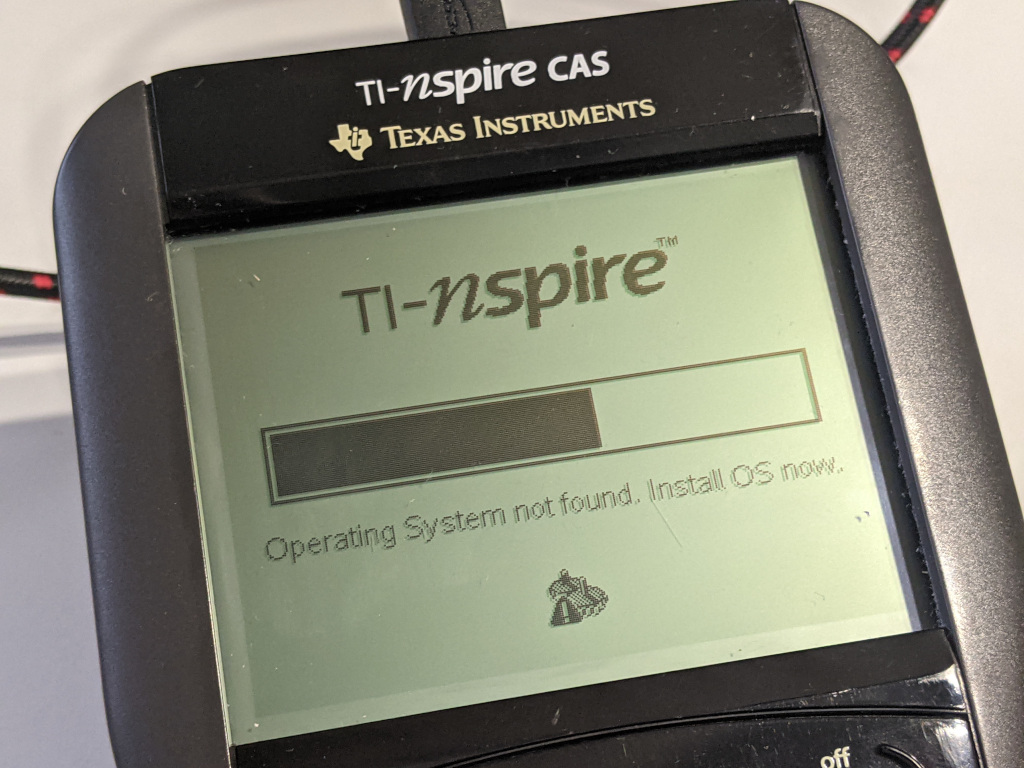
Nach etwas Fortschrittsbalken stand auf dem Display nur noch „Operating System not found. Install OS now.“, und mir ging etwas der Puls…
Operating System not found
Das Betriebssystem konnte ich bei Texas Instruments freundlicherweise runterladen (TI-NspireCAS-3.9.0.463.tnc). Die Software die der Hersteller für diesen Fall vorhält (TINspireComputerLink-3.9.0.455.exe) wird aber nur für Mac und Windows angeboten, sowas habe ich nicht. Unter Wine konnte ich das Tool zwar installieren, es hat aber den Rechner nicht gefunden.
Die Lösung war dann ein freies Tool mit dem Namen TiLP. Die Webseite sieht nach nix aus, die letzten News sind von 2013. Aber meine Distribution bringt das als Paket mit, also ist es einen Versuch wert. Und was soll ich sagen? Es hat auf Anhieb den Rechner gefunden, ich konnte die Firmware per Mausklick hochladen.
Nach der Aktion habe ich jetzt nicht nur einen frisch zurückgesetzten Taschenrechner, sondern sogar einen mit dem aktuellsten Betriebssystem — und frisch zurückgewonnenen Respekt vor dem Ausdruck „complete format“…
Nur ganz kurz: heute hat meine Trude „Geburtstag“. Die Erstzulassung war genau heute vor 30 Jahren.
Leider habe ich die Maschine in den letzten Jahren ziemlich vernachlässigt. Nicht nur dass sie seit mehreren Jahren nicht gefahren oder gepflegt wurde, bevor die das erste Mal wieder in Richtung Strasse unterwegs sein darf steht noch eine Reparatur an, vermutlich haben sich auch schon die Reifen kaputt gestanden. Die ist wirklich in einem erbärmlichen Zustand.
Ich hoffe dass ich in diesem Sommer den Elan finde das Ding wieder auf Vordermann zu bringen, rechne mir da aber keine allzu großen Chancen aus. Vernünftig wäre es sicher die zu verkaufen, aber das wird nicht passieren. Solange die im Keller steht weiss ich dass ich es selbst in der Hand habe ob ich fahre oder nicht. Wenn ich die verkaufen würde hätte ich in dem Moment Sehnsucht in dem ich andere Maschinen auf der Strasse sehe…
Jeder kennt Werbeanrufe, ich glaube nicht dass es jemanden gibt der die nicht nervig findet. Heute ist meine Frau ans Telefon gegangen. Ich war in einer Videokonferenz, habe es nur von nebenan gehört:
„Ja, der ist da. Ist aber gerade beschäftigt. Was wollen Sie denn von dem?“ „Nein, ich gebe das Telefon jetzt nicht weiter. Erst sagen Sie wer Sie sind und was Sie wollen.“ „Wenn Sie mir nicht sagen wer Sie sind und in wessen Auftrag Sie anrufen lege ich jetzt auf.“
Später hat sie mir grinsend erzählt dass der Mann am anderen Ende angeblich schon im Januar mit mir gesprochen hätte, es ginge um Finanzdienstleistungen. Grinsend, weil sie weiss dass ich nicht mal mit unserem Steuerberater über Finanzen reden möchte, ganz bestimmt nicht mit irgendwem der am Telefon seinen Namen nicht sagen will…
Ich hätte die Geduld nicht aufgebracht. Mir ist das zu bunt geworden, also habe ich meine Konferenz unterbrochen und das Telefon übernommen. Zugegeben: ich war dabei nicht sonderlich höflich. Aus Gründen. Hab ohne Begrüssung meine Standardfloskel runtergeleiert: „Ich weiss nicht wer Sie sind, habe kein Interesse an diesem Gespräch und möchte bitte nie wieder von Ihnen angerufen werden. Streichen Sie mich von der Liste.“
Daraufhin hat der Anrufer angefangen sich über meinen Ton zu beschweren. Was das denn für eine Art wäre, und so weiter. „Was für ein Bauer.“ habe ich verstanden. Ich hatte keine Lust auf das Gespräch, also habe ich aufgelegt und bin wieder an meine Arbeit gegangen. Das heisst: ich wollte.
Das Log aus der Telefonanlage
Nach fünf Sekunden hat es wieder geklingelt.
Ich habe übertrieben freundlich eröffnet: „Ich wünsche einen schönen guten Morgen, wie kann ich Ihnen helfen?“. Er hielt das für eine Frechheit. Ich fragte ob er weiß dass diese Art von Anruf in Deutschland verboten wäre (hab erst später gesehen dass er eine österreichische Nummer hatte). Der Mann war nicht glücklich, hat irgendwas von negativen Bewertungen gebrabbelt die er mir bei Google geben wollte. „Negative Google-Bewertungen für Privatpersonen, nette Idee.“ — und ich habe wieder aufgelegt.
Beim dritten Anruf habe ich nur noch das Telefon zur Seite gelegt. Soll er doch mit dem Tisch sprechen, ist ja seine Zeit.
Das Log aus dem Handy
Einmal hat es noch am Handy geklingelt. Da hat er nichts gesagt, die Nummer ist aber eine von den dreien gewesen mit denen er vorher angerufen hatte. Immerhin war ich beeindruckt von seinen Daten: die sind so gut dass er nicht nur Festnetz- sondern auch Handynummer hat.
Gerade stellt sich raus — beweisen lässt sich das nicht, aber doch schwer vermuten: er hat offenbar auch die Mailadresse passend. Mein Postfach sagt dass ich mich direkt nach dem Vorfall gleich bei mehreren Newslettern angemeldet habe.
Das Log aus dem Postfach
Was das über diesen Wicht aussagt darf sich jeder selbst ausmalen. Klar: das Schicksal kann jeden Treffen, und dann landet man vielleicht in einer Position in der man versucht Geld damit zu machen anderen auf den Geist zu gehen. Dass er aber aus den Telefonaten noch die Motivation gezogen hat, mehrere Minuten meine Adresse in irgendwelche Anmeldeformulare zu hacken ist bemerkenswert.
Lustig finde ich die Themen die ihm als erstes eingefallen sind. Menschen die sich offen mit ihrer Sexualität auseinandersetzen. Die haben im Gegensatz zu diesem Telefonmann meinen vollen Respekt. Glaubt er, mich damit diffamieren zu können? Das wäre mit Newslettern zu Finanzdienstleistungen deutlich besser gegangen…
Letztes Jahr habe ich zweiArtikel über mein 85mm Takumar geschrieben, eine Linse die älter ist als ich, die ich eigentlich nur noch als Makro am Balgen benutze, und die ich offenbar massiv unterschätzt habe (sowohl in Bezug auf Abbildungsqualität, auf Zeitwert als auch in Bezug auf Radioaktivität ). Das Ding habe ich irgendwann in den 90ern auf einer Fotobörse gekauft.
Zenit Helios 44-2
Deutlich länger in meinem Besitz ist ein Helios 44-2, das habe ich mir jetzt nochmal genauer angesehen nachdem es jemand auf YouTube belobhudelt hat.
Das Helios entstammt russischer Produktion des Herstellers mit dem klangvollen Namen Krasnogorski sawod imeni S. A. Swerewa, im Volksmund auch KMZ oder Zenit genannt. Es hat einen M42-Anschluss, eine Festbrennweite von 58mm und mit 2.0 eine anständige Offenblende. Ich habe das in den 80ern zusammen mit einem 35er, einem 135er und einer voll-manuellen Spiegelreflex — es müsste eine Revueflex E gewesen sein (also vor dem Umlabeln auch eine Zenit) — aus dem Nachlass meines Opas. Er wird das Objektiv zusammen mit der Kamera in den 70ern gekauft haben. Aus dem Equipment habe ich leider nur noch das Helios.
In dem Video wurde das Bokeh gepriesen. Ich muss gestehen dass ich als Banause in der Regel wesentlich mehr auf das achte was ich abbilde als auf das was ich nicht abbilde. Vor allem habe ich sowas noch nie verglichen. Bis vorhin.
Helios vs. Canon
Hier sieht man unseren Weihnachtsbaum aus etwa 2m Entfernung. Das sind jeweils Bilder in Komplettbreite, keine Ausschnittvergrößerungen.
Oben ist zu sehen wie ihn das alte Helios darstellt, unten was vergleichbares mit einem Canon EF 28-135 (fairer wäre es gewesen wenn ich das 50mm dazugeholt hätte, das fällt mir aber auch jetzt erst ein). Beides natürlich komplett out of focus, dafür sieht man schön den Unterschied. Nicht so sehr im Swirl-Effekt den das Video angepriesen hat, mehr in der Abbildung der Unschärfepunkte an sich.
Ich fange an, den Oldtimer wirklich wertzuschätzen. Die Abbildung ist auf jeden Fall deutlich interessanter als bei der modernen Optik. Allerdings habe ich die Befürchtung dass ich trotz des Wissens auch in Zukunft viel zu selten daran denke das vielleicht auch mal kreativ einzusetzen.
Finger mit Monden
Ein Testbild in dem die Schärfeebene zwischen meiner Hand und dem Tannenbaum lag macht auf jeden Fall neugierig. Und das war noch eine zurückhaltende Einstellung, damit die Finger noch als solche erkennbar sind. Vielleicht muss ich mal eine Weile komplett auf das Altglas umsteigen…
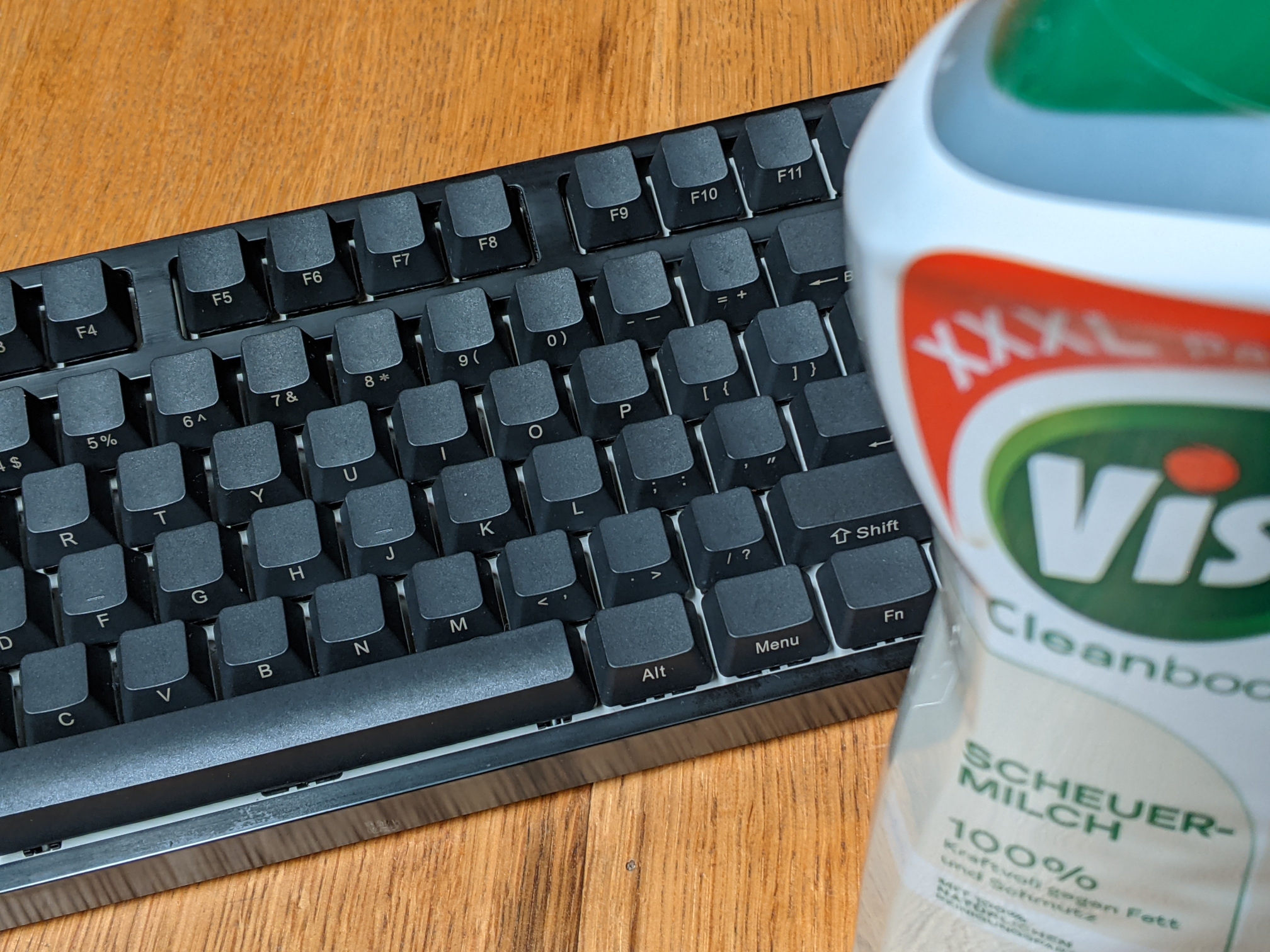
Vielleicht erinnert sich noch jemand an meinen Tastaturfimmel.
Über mehrere Jahre war mein Daily Driver im Großraumbüro ein Modell mit dem etwas sperrigen Namen CM Storm Quick Fire Rapid-i. Ein TKL-Modell (Tenkeyless, also ohne Ziffernblock) mit Cherry MX Schaltern in braun (also mit Druckpunkt aber ohne lauten Klick). Ideal also, wenn man nicht alleine im Raum sitzt.
Ein ärgerliches Problem hat sich sehr schnell gezeigt: die Hintergrundbeleuchtung ist… sagen wir mal: elektrisch fragil. Ich habe das Ding gebraucht gekauft, in dem Wissen dass einige LEDs nicht funktioniert haben. Die habe ich damals repariert, kurz darauf sind weitere ausgefallen. Mittlerweile ist mehr als die Hälfte der Lampen defekt. Schade, aber im gut beleuchteten (meiner Meinung nach viel zu hellen) Büro zu verkraften. Ich brauche die nicht.
Ein zweites und deutlich ärgerlicheres Problem hat sich erst nach längerer Zeit ergeben. Das Modell ist von 2014, und aus irgendeinem Grund ist der Rahmen mit einer Art Gummierung beschichtet. Die löst sich im Laufe der Jahrmillionen auf und wird zu einer klebrigen Oberfläche. Echt ekelig, wie eine dünne Schicht Honig.
Kürzlich habe ich günstig einen Satz Ninja-Tastenkappen bekommen, ideal für eine Tastatur mit ohnehin dysfunktionaler Beleuchtung. Aber so klebrig wollte ich die auch nicht mehr nutzen.
Ich habe verschiedene Sachen ausprobiert um das Zeug da runter zu kriegen. Heißes Wasser, Spülmittel, Isopropanol… tat’s alles nicht ordentlich. Benzin wäre vielleicht noch gegangen, aber darauf bin ich zu spät gekommen. Aceton hätte mir vermutlich das komplette Teil aufgelöst. Eine Schnapsidee die aber erstaunlich gut funktioniert hat war dann Scheuermilch aus der Küche. Ich musste immer noch kräftig schrubben, aber das Ergebnis war es wert.
Nicht nur, dass ich jetzt eine schicke Ninja-Tastatur mit braunen MXen habe, vermutlich habe ich zur Zeit auch eine der wohlriechendsten Tastaturen überhaupt.
Gerade habe ich in einem Fotografie-Podcast das Wort „Clownkotze“ gehört, da komm ich nicht drüber weg.
Eigentlich war das nicht mal das Thema von Wrint 1434, das kam nur kurz zur Sprache. Das Wort hatte ich vorher aber noch nie gehört.
Man kann sich denken dass damit was besonders buntes bezeichnet wird. Also nicht nur „farbig“ sondern „bunt“. Und speziell im Bereich der Fotografie scheint das despektierlich auf übertriebene HDR-Effekte angewandt zu werden.
Mit dem Thema hatte ich mich vor 15 Jahren mal etwas beschäftigt, seitdem eigentlich nur mal kurz in Form eines Kitschfilters auf dem Handy. Welches Programm ich dafür benutzt habe weiß ich gar nicht mehr. Geschrieben habe ich was über CinePaint, kann sein dass es das war. Laut EXIF-Daten habe ich offenbar ein Programm namens Qtpfsgui benutzt, das firmiert heute unter Luminance HDR. Ich erinnere mich aber dass ich für meine Bilder die 400D auf einem Stativ hatte, und dann mit ±2 eine Belichtungsreihe gemacht habe. Die drei Bilder dann durch $software gezogen, alle Regler auf 11 gestellt, et voilá: Clownkotze.
Wie viele andere auch zur Zeit bin ich dabei, mich von Twitter zurückzuziehen. So richtig wohl war mir mit dem Dienst eh nie, obwohl ich mich in den letzten zehn Jahren ganz gut damit arrangiert habe. Geschrieben habe ich da fast nichts, auch Retweets waren selten. Dieser Blog war automatisch angebunden und hat bei jedem neuen Post eine Nachricht verfasst. Ich habe da hauptsächlich gelesen. Lustige Sachen, Technik und Nachrichten. Wenig Interaktion.
Vor fast genau 13 Jahren habe ich meinen ersten Twitter-Account nach einer kurzen Testphase gelöscht. Ich zitiere mich mal selbst aus dem Kommentar den ich dazu geschrieben habe:
Und nach wie vor hat niemand mein Hauptargument zu dem Thema entkräftet: Wenn — entgegen meiner oberflächlichen Erfahrung — Twitter (oder Microblogging allgemein) tatsächlich ein wichtiger Informationskanal im Netz sein sollte, dann muss der meiner Meinung nach dezentral aufgebaut sein. Hinter Web, Mail, IRC und so weiter stecken keine einzelnen Unternehmen. Das ist gut und wichtig so, denn einzelne Unternehmen können manipulieren, oder was in so einem Fall mindestens genau so fatal wäre: pleite gehen. Mit einem Schlag wären abermillionen Twitter-Junkies ihren Kommunikationskanal los.
Ich selbst, November 2009
Jetzt ist es also tatsächlich so gekommen. Den Dienst gibt es noch, die Firma auch. Allerdings ist die von einem Typen übernommen worden der die ohnehin schwierige Situation für viele unerträglich gemacht hat. Ein Exodus ist die Folge, und ich hoffe inständig dass der diesmal tatsächlich durchgezogen wird. Und tatsächlich zu einem dezentralen Dienst.
Mastodon scheint das Sammelbecken für Twitter-Quitter (tschuldigung, ist mir rausgerutscht) zu sein. Ich habe mir vor zwei Wochen einen Account geklickt, das ist nicht schwierig. Und ich sehe da schon viele der Leute denen ich auf Twitter gerne gefolgt bin. Tendenz steigend.
Die Schatenseite bei Mastodon
Meine Präsenz da möchte ich etwas anders angehen, deshalb habe ich heute noch einen separaten Account für die Schatenseite angelegt. Da ist — wie bisher bei Twitter — der Blog angebunden, neue Posts erscheinen da automatisch. Sonst nichts.
Wer also kein Interesse an sonstigem Rumgealbere hat möge bitte nur der Schatenseite folgen, ansonsten gerne auch mir. Oder eben auch gar nicht. Ich verdiene da nix dran.
Ich bin in den letzten Tagen einige Male die Liste der Accounts durchgegangen die ich auf Twitter sehe. Ich suche die jeweils auf Mastodon, wenn ich sie gefunden habe wird bei Twitter entfolgt. Sobald ich den Eindruck habe dass da nichts mehr zu holen ist werde ich meinen Twitter-Account nicht nur brach liegen lassen sondern tatsächlich auch löschen. Aktuell möchte ich da nicht mal mehr als Karteileiche rumliegen.
Idee am Rande: gibt es eigentlich schon eine Möglichkeit, Twitter-Accounts aus Mastodon heraus zu folgen? Es gibt da einige mit denen ich eh nicht interagiere, die ich aber gerne weiter lesen würde. Auch nach zehn Jahren lesen ich zum Beispiel gerne @RealTimeWWII, ich habe da viel gelernt und würde die Geschichte gerne bis zum Ende miterleben. Schwierig wäre es sicher nicht, eine Art Einbahnstraßen-Proxy-Bot zu bauen. Bestimmt aber rechtlich fragwürdig. Ich denke da mal weiter drüber nach…
Natürlich birgt die ganze Sache auch das Risiko dass diese Völkerwanderung nur ein Sturm im Wasserglas ist. Demnächst stellt sich raus dass die Art wie der Laden zur Zeit geführt wird nicht tragfähig ist, dann werden versönlichere Töne angeschlagen und alle kommen wieder zurück. Ich will nicht ausschliessen das ich das auch täte. Bis dahin hoffe ich aber wirklich mal auf das gute im Menschen, und darauf dass sich hier ein dezentraler und freier Dienst durchsetzen wird.
Man sagt dass ein Pessimist auch nur ein Optimist mit Erfahrung ist. Meine Erfahrung sagt mir dass ich auf dem Holzweg bin. Gerade ist mir aber danach, dem Optimisten in mir viel Handlungsfreiheit einzuräumen… die kriegt der nicht oft.
Seit ein paar Tagen beschäftige ich mich intensiv damit, wie man mit dem Computer Musik macht. Vorweg: ich bin kein Musiker, und ich werde auch keiner. Aber eine von meinen Lieblingstöchtern singt gerne, und das nehme ich natürlich gerne als Aufhänger dafür mich in ein neues Gebiet reinzunerden.
Ich nutze wann immer das möglich ist freie Software, also bin ich bei der Aufnahme und Bearbeitung von Sound ziemlich schnell — nach einem kurzen aber unvermeidbaren Zwischenstopp bei Audacity — bei Ardour gelandet. Das ist eine Digital Audio Workstation, offenbar nutzen Leute mit Ahnung sowas um Musik zu produzieren. Einige Namen der kommerziellen Konkurrenz habe ich schon gehört: Ableton, Reason oder Cubase. Wie weit Ardour davon entfernt ist weiss ich nicht, auf jeden Fall bin ich beeindruckt (und erschlagen) von dem Funktionsumfang.
Unter anderem kann man mit dem Ding (natürlich) MIDI abspielen, also praktisch Musikinstrumente bedienen ohne wirklich Ahnung von Rhythmus oder Melodie zu haben. Dabei können die Instrumente dafür wirkliche MIDI-Instrumente sein (mit Tasteninstrumenten rechnet man irgendwie, ich habe aber auch schon MIDI-Gitarren (nein, nicht solche Playstation-Teile!) und ein MIDI-Akkordeon gesehen), oder Synthesizer — tatsächlich im Sinne von Tongenerator, einzubinden als Plugin in Ardour.
Und eben ein solcher ist Cardinal. Und zwar einer von der modularen Sorte:
Ein „Patch“ den ich am Beispiel eines Videos gemacht habe.
Modulare Synthesizer bestehen, wie der Name schon suggeriert, aus Modulen aus denen man sich seinen Klanggenerator zusammenbaut. In der wirklichen Welt funktioniert das ähnlich wie Lego: man gibt viel Geld für die Module aus, schraubt sich die Dinger in ein Rack und bastelt mit Kabeln und Knöpfchen so lange rum bis man seinen Sound gefunden hat.
Vor einigen Jahren gab es dazu eine Ausgabe von CRE, und da die Technik eigentlich antiquitiert gut abgehangen ist hat die nichts von ihrer Aktualität verloren. Wer sich für das Thema interessiert kriegt da auf jeden Fall einen guten Überblick.
Ich bin hoch erfreut dass es sowas in virtuell gibt. Nicht weil ich da einen Nutzen raus ziehen könnte, sondern weil es mich immer schon gereizt hat mit so einem Ding zu spielen. Vor Ewigkeiten hatte ich mal einen Abend die Gelegenheit mit einem moderneren Synthesizer zu spielen, einem Roland MC-505. Das hat schon echt Spass gemacht, und ich könnte da immer noch eine Menge Spaß mit haben. Das hier ist aber wesentlich ursprünglicher, und auch wenn mich der Funktionsumfang erschlägt — mitgeliefert werden 974 (!!!) unterschiedliche Module — ist das echt ein spannendes Spielzeug.
Oh, und noch ein Tipp: wer nicht alleine wohnt sollte für den ausgedehnten Spielspaß unbedingt Kopfhörer haben…
Letztens habe ich was kleines fotografiert, noch dazu aus einer komischen Perspektive — unter fiesen Verrenkungen, damit ich hinter der Kamera halbwegs sehen konnte was ich da treibe.
„Ein Winkelsucher… sowas gibt’s bestimmt für meine EOS.“
Ja, gibt es. UVP ist allerdings jenseits von 300 Euro, Straßenpreis immer noch deutlich über 150 Euro. Zu viel für den seltenen Einsatz. Also habe ich mich auf dem Sekundärmarkt umgesehen. Ganz billig wäre ein Dritthersteller gewesen, aber mir sind da direkt auch Originale aufgefallen. Einer ganz besonders…
Den gab es gegen einen Aufpreis zu dem ich nicht nein sagen konnte als Paket mit einem — ebenfalls originalen — Kabelauslöser und einer Kamera mit mehreren Akkus, Ladegerät und einer Spannungsversorgung für Netzstrom.
Bei der Kamera handelt es sich um ein älteres Modell, Jahrgang 2005. Aber auch um ein besonderes Modell: Canon EOS 20Da. Die allwissende Müllhalde sagt dazu folgendes:
Das Modell EOS 20Da ist eine Spezialversion der Kamera, die für die Astrofotografie konzipiert wurde. Sie besitzt einen modifizierten Tiefpassfilter, der den für astronomische Beobachtungen wichtigen Wellenlängenbereich um die Alpha-Linie des Wasserstoffs (H α, Fraunhoferlinie) weniger dämpft. Außerdem wurde eine Fokussierhilfe eingebaut, die manuelles Fokussieren mit Hilfe einer vergrößerten Darstellung auf dem Display erleichtert, wodurch der Betrieb an Teleskopen stark vereinfacht wird.
Mir ist jetzt also ein Sondermodell aus der EOS-Reihe in den Schoß gefallen. Und das ohne dass ich eine konkrete Verwendung dafür hätte: ich habe gar kein Teleskop!
Weniger Dämpfung im Infrarotbereich klingt erstmal als ob ich damit auch mal ein paar Versuche in Richtung IR-Fotografie machen könnte. Das habe ich mit der großen schon versucht, bislang aber noch ohne durchschlagenden Erfolg. Keine Ahnung wie sich das auswirkt, ich weiß nicht was der Filter genau durchlässt.
Was könnte ich denn sonst noch spannendes damit anstellen? Ich habe hier zwei alte 500mm-Brennweiten mit einer optischen Qualität knapp über „Flaschenboden“ (sogenannte „Russentonne“ und „Wundertüte“), und damit möglichst gar nichts mehr erkennbar ist könnte ich noch einen Telekonverter dazu nehmen. Damit in die Astrofotografie zu gehen wäre wohl überambitioniert. Zumal ich auch keine Nachführung auf meinem Stativ habe.





 ). Das Ding habe ich irgendwann in den 90ern auf einer Fotobörse gekauft.
). Das Ding habe ich irgendwann in den 90ern auf einer Fotobörse gekauft.